
















EC机器人碰撞检测设定的注意事项
1. 碰撞检测原理
机器人的碰撞检测原理:
1. 测量机器人手臂各关节电机中的电流。
2. 基于动力学模型构建机器人外力矩观测器。
因此,机器人的碰撞停止力度受到姿态,速度,负载等因素影响,无法精准单位表示停止力,具体如何设置百分比需要根据现场情况逐步调整。
2. 如何设置碰撞检测
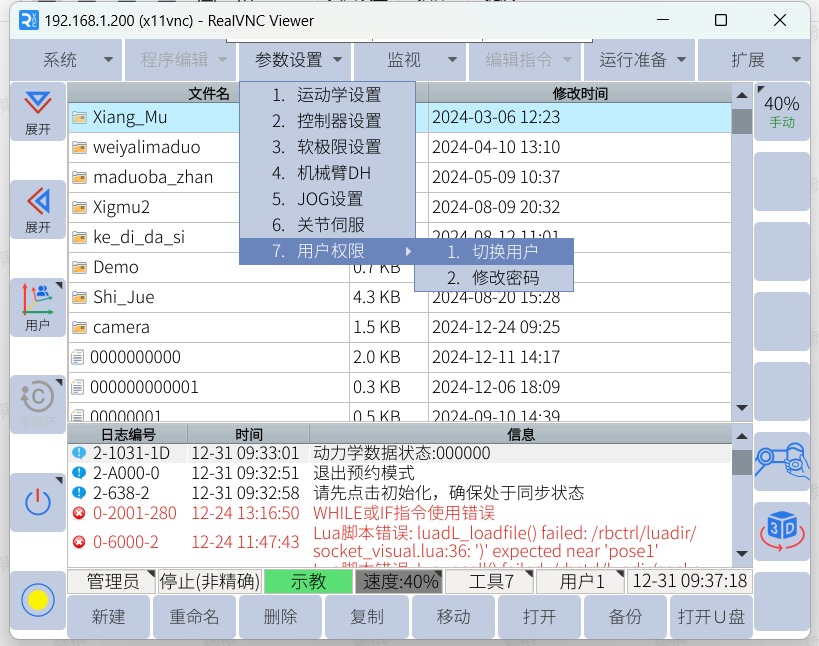
1. 参数设置—用户权限—切换用户—切换到管理员模式,密码:333333
2. 运行准备—安装设置—选择对应的安装方式
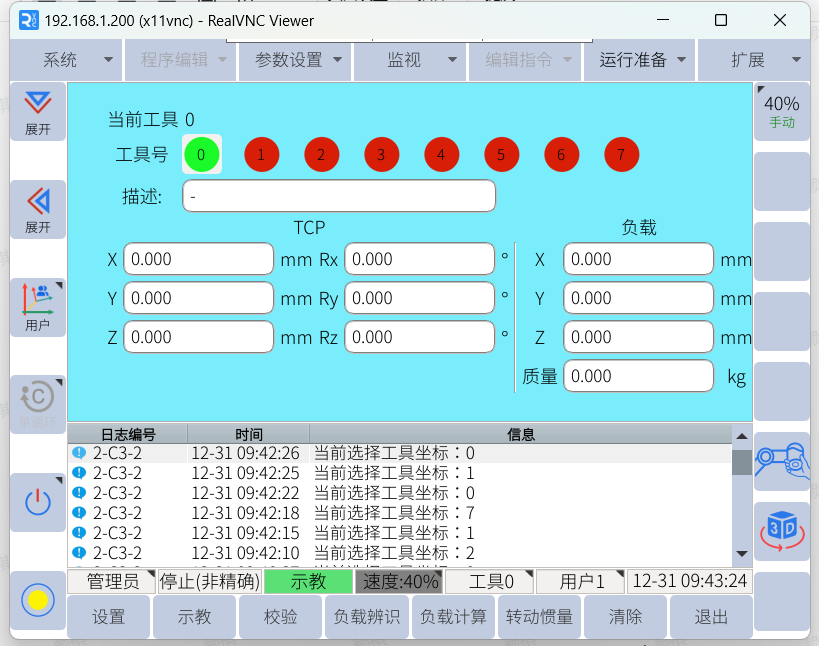
3.运行准备—工具负载设置—选择一个工具号,左下角设置使工具号变成绿色即可打开。
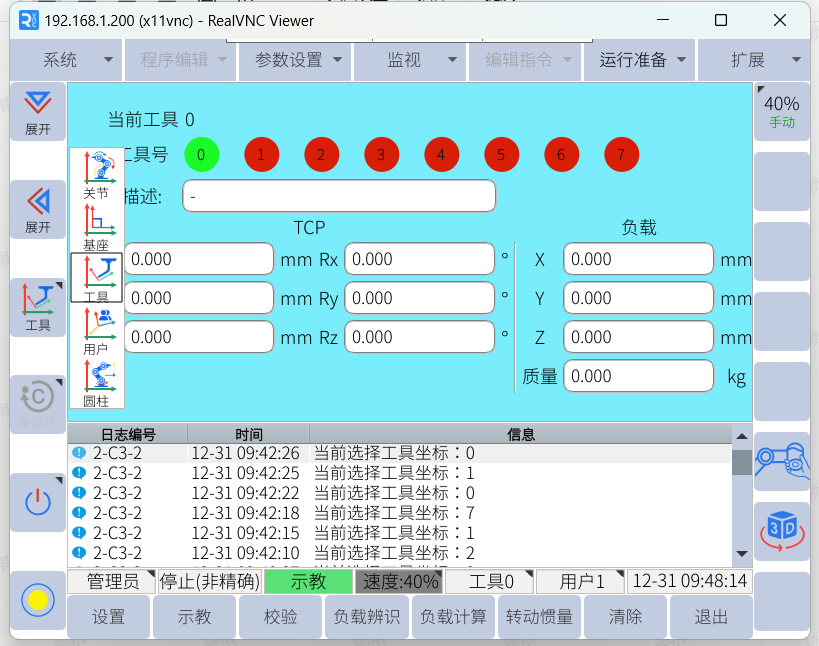
4. 设置末端安装工具的负载和重心,重心是以工具坐标系方向为参考,可通过手动示教器选择工具坐标系查看方向,填写完成后点击左下角设置并重启机器人。
5. 如无法确定末端工具重量和重心,机器人可以自动识别。
● 确认机器人未装配负载,并点击“运行准备 > 工具负载设置”,确保负载参数为 0
● 将钥匙转至自动模式,并打开伺服
● 设置循环模式为“单循环”
● 长按窗口切换键

点击“负载运行”,等待三分钟即可
● 装配负载
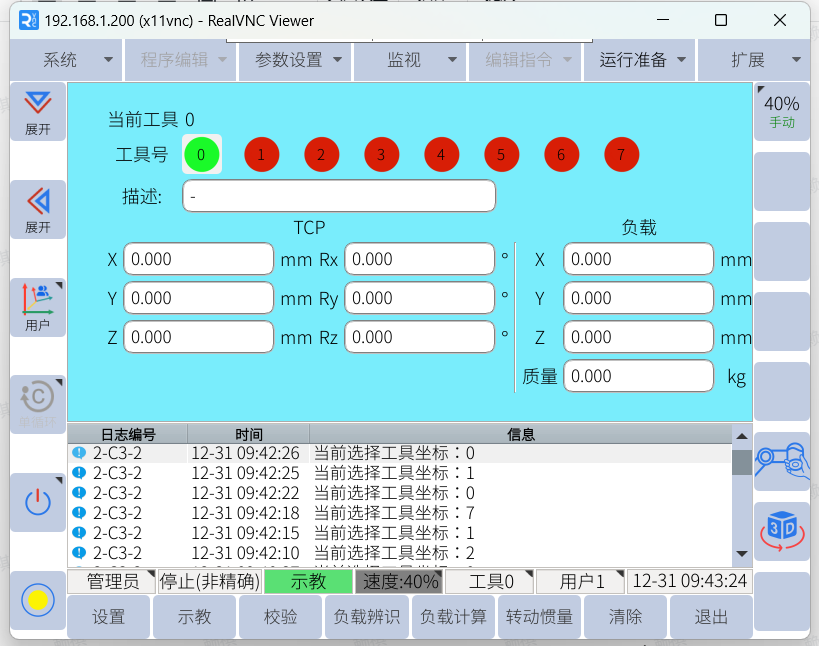
● 将钥匙转至示教模式,点击“运行准备 > 工具负载设置”,进入工具设置界面
● 点击“负载辨识”,在弹出页面点击“确定”,耐心等待 2 分钟,系统将计算出负载对应
的质心和质量,并显示出来
● 点击“设置”并重启机器人。
6. 设置碰撞检测灵敏度,运行准备—安装配置—碰撞检测,如碰撞状态是红色,可点击左下角“打开“启动碰撞功能。
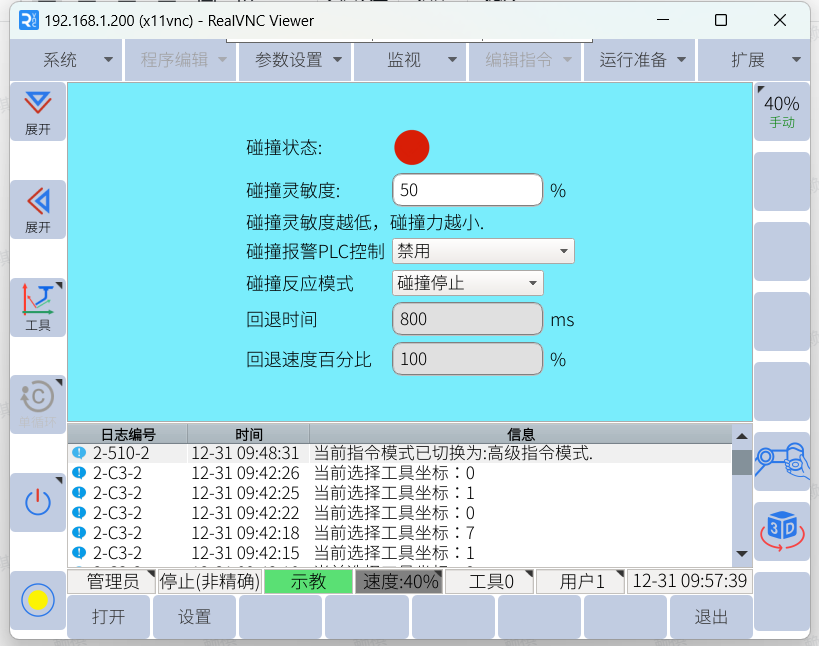
7. 碰撞灵敏度:10%-100%,百分比越小越灵敏,停止力也越小。
碰撞报警PLC控制:可通过机器人用户PLC控制碰撞状态启动或关闭。
碰撞反应模式:可选碰撞停止和碰撞回退
回退时间和回退速度百分比:可控制碰撞回退的反应时间和速度
3. 碰撞停止的注意事项
1. 一定要设置机器人的负载和重心才可启动,如果误差过大可能会导致动力学校验失败,无法开启碰撞检测功能
2. 设置百分比要结合机器人当前的负载,速度,姿态,例如机器人速度很快,满负载,设置20%会导致机器人正常运行报警碰撞,推荐可以先设置50%,后续运行程序逐步更改。
3. 如末端使用了第三方的力传感器,机器人连接上传感器后,末端工具的碰撞检测力默认是20N,其他关节依旧是使用机器人电流检测力,当传感器受力超过20N会报6轴碰撞停止。如需修改20N的力需要进入机器人内置文件夹:

将上图中数值‘20’修改即可,范围是力传感器的量程(建议在艾利特技术的指导下操作)。


























