
















EC机器人碰撞灵敏度
1. 简介
1.1 功能介绍
协作机器人具备碰撞检测功能,当机器人本体上电外力超过用户安全设置的正常受力范围时,机器人本体自动停止,以防机器人或操作人员碰撞受伤。而碰撞灵敏度是协作机器人在安全方面的一个特色。
1.2 功能用途
用户可通过手持示教器、网页版示教器进行EC系列机器人碰撞检测灵敏度调节,当机器人开启碰撞检测后,可以设置不同的碰撞灵敏度,以便更安全、灵活地适应不同的工作场景。
2. 操作流程
2.1 手持示教器操作
点击运行准备——安全配置——碰撞检测
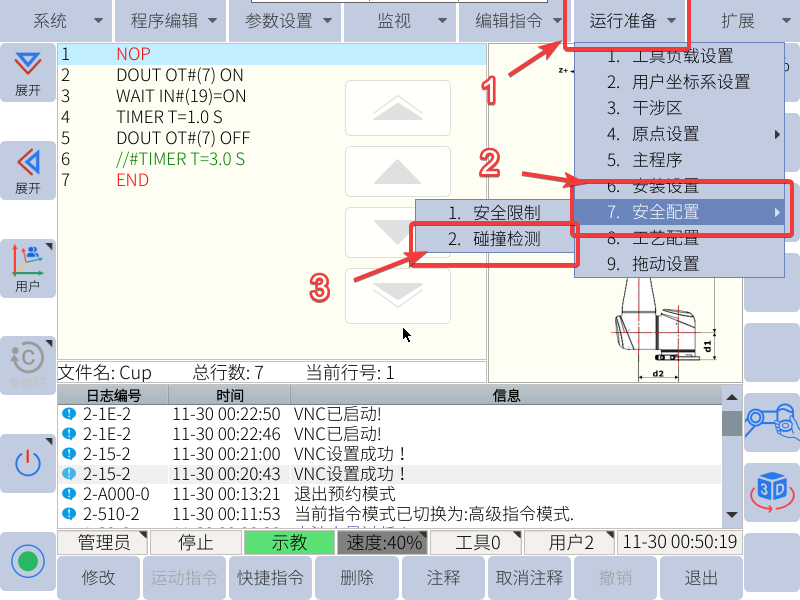
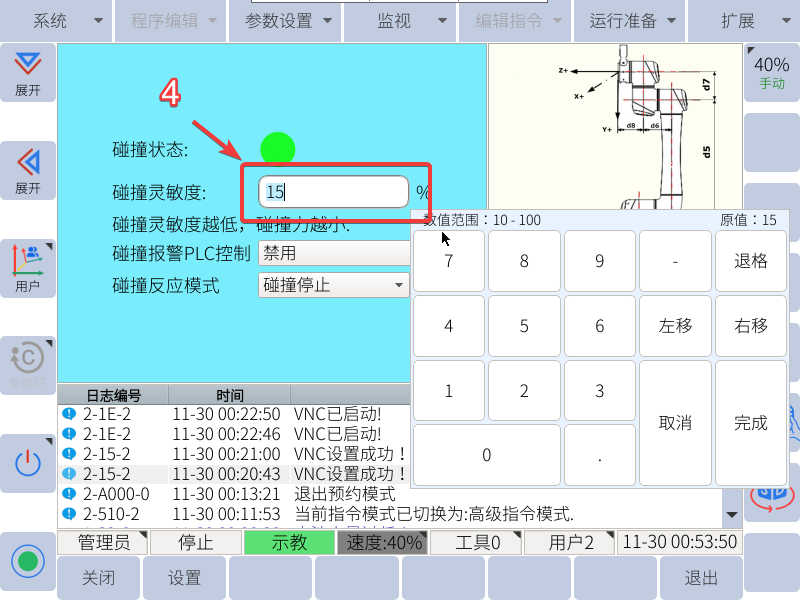
点击设置碰撞灵敏度(数值范围10-100)
tips:机器人开启碰撞检测后,灵敏度设置的越小,代表机器人越灵敏,触发机器人“碰撞检测报警”所需要的力便越小。
2.2 网页版示教器操作
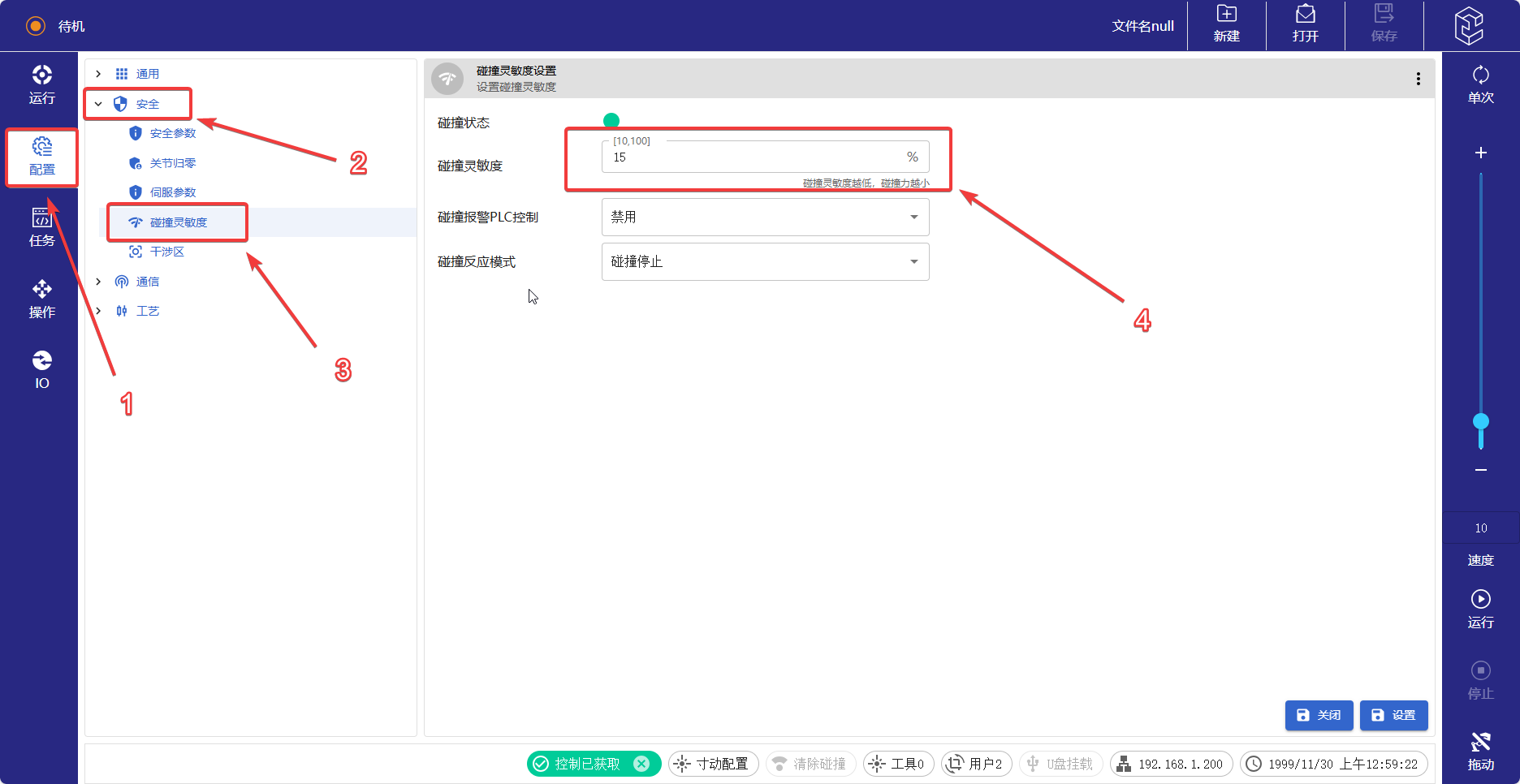
点击配置——安全——碰撞灵敏度——点击参数窗口即可修改(范围10-100)
2.3 端口发送指令修改
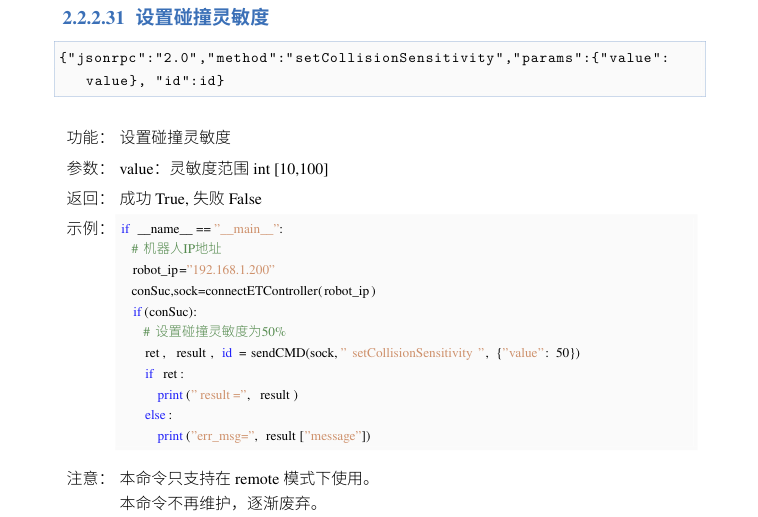
通过8055端口,发送设置碰撞灵敏度指令:{"jsonrpc":"2.0","method":"setCollisionSensitivity","params":{"value": value}, "id":id}
参数:value:灵敏度范围int[10,100]
3. 常见问题解答
3.1 负载设置的注意事项
灵敏度实际效果与负载的设置相关联,设置机器人负载时注意夹爪质量、实际工件质量以及重心。
3.2 碰撞灵敏度数值大小的定义
机器人开启碰撞检测后,灵敏度设置的越小,代表机器人越灵敏,触发机器人“碰撞检测报警”所需要的力便越小。
3.3 在使用过程中,碰撞灵敏度的设置区间
通常是设置30%-50%这个区间。但是我们的使用场景是灵活多变的,根据不同的场景需要,或者末端工具比较特殊时,此时我们可以需要把该灵敏度设置地更大。比如说当负载特别大时,或者工具重心距离末端法兰特别远时。
3.4 碰撞检测配置功能
碰撞报警PLC控制:由用户PLC配置程序控制S25碰撞检测使能/禁用;
碰撞反应模式:1、碰撞回退,触发碰撞检测报警后,机器人会朝着受力反方向移动一段距离;2、碰撞停止,触发碰撞检测报警后机器人停止在原位。


























