EC机器人抱闸方式
2025-05-12
1. 简介
电磁插销式抱闸相比电磁刹车片式抱闸有下列优点:1.轴向尺寸更紧凑;2. 电磁线圈发热量更小,散热效果也更好;3.成本更低。但是,电磁插销式抱闸也有一个缺点就是抱闸定位效果不好,机器人掉电之后关节有一个(60度/减速 比)的活动范围;关机/急停后会有稍许的下坠。
2. 操作流程
2.1. 结构说明
● ELITE 机器人关节没有采用主流工业机器人关节电机里面的电磁刹车片式抱闸,创新性地采用了电磁插销式抱闸。先介绍一下电磁插销式抱闸的工作原理。

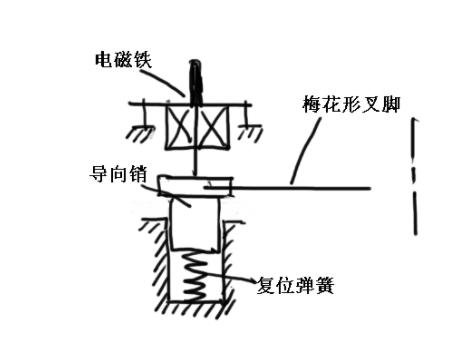
● 梅花形叉脚与电机轴相连。在电磁铁未通电的状态下,导向销在复位弹簧的作用下弹起,其肩部刚好可以挡住梅花形叉脚。这时抱闸处于闭合状态。在电磁铁通电或手动按下状态下,导向销下沉其肩部低于梅花形叉脚。这时抱闸出于打开状态。
2.2. 松开抱闸的方法
● 如图点击“RST”,弹出
点击确定
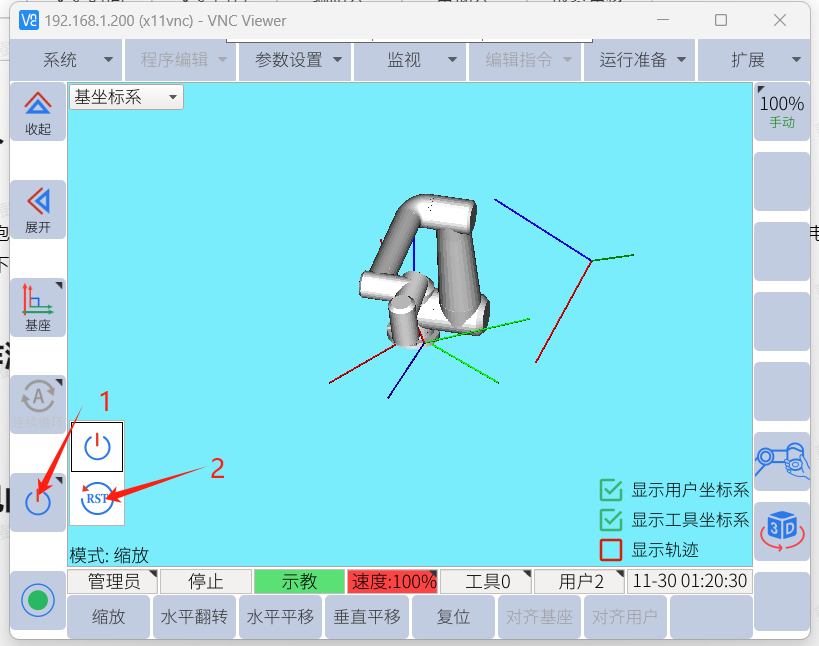
● 此时信息栏提示“机器人状态已经被重置”,在点击“BKD”.弹出
点击确定
● 进入反向驱动状态。手动可以掰动机器人至安全区域后,点击“退出”。

3. 常见问题解答
1. 反向驱动模式只可在机器人初始化状态下进入。
2. 操作松开抱闸流程时,插销式抱闸关节只要受到一定的力会自动松开抱闸。
3. 控制器版本 V3.1.2,伺服版本 V11.37 及以上版本机器人反向驱动按照操作流程。
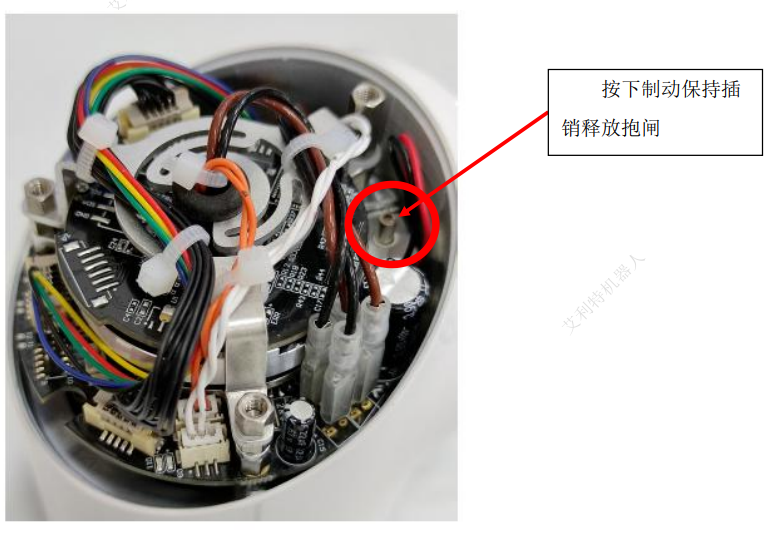
4. V3.1 以下版本无反向驱动模式,如遇紧急情况请立即按下紧急停止按钮切断电源,移除相应的关节盖,并释放制动保持插销,让关节自由移动。
5.