
















EC机器人拖动参数设置
1. 简介
在实际操作中,我们常常会用到拖动,可以达到快速移动机器人的目的。设置合适的拖动参数可以使拖动变得更加灵活
2.操作流程
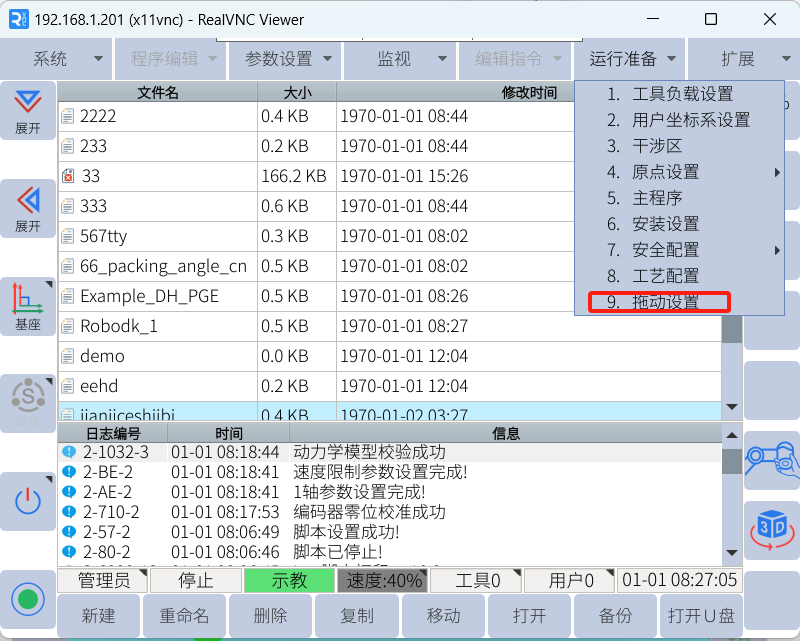
2.1打开拖动设置。
先升级为管理员权限模式,管理员权限密码为333333,在运行准备中,点击拖动设置。
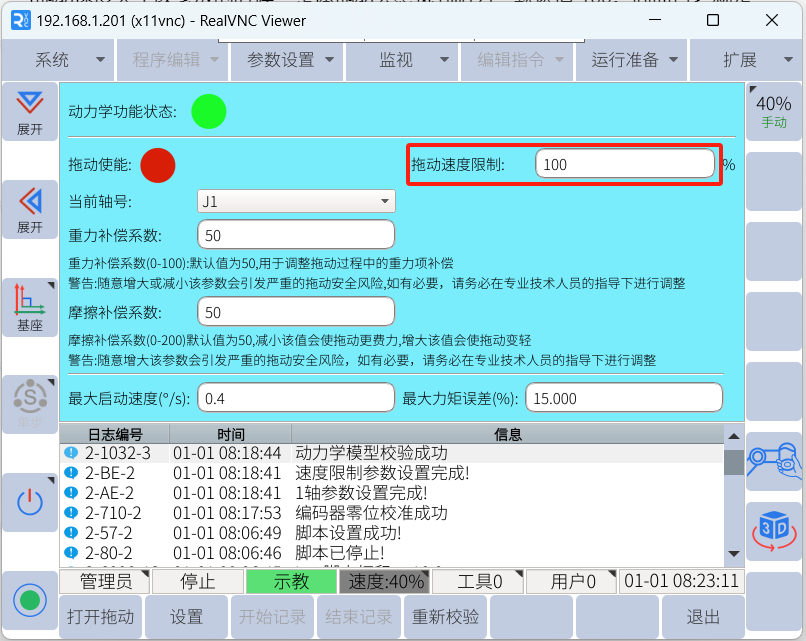
2.2拖动速度限制
定义:限制拖动速度的参数。
当拖动速度大于改参数的时候,整体拖动会感觉到阻力,默认值 100。简而言之就是该值为拖动速度的限制,设置的越小,阻力越小就会越轻松。
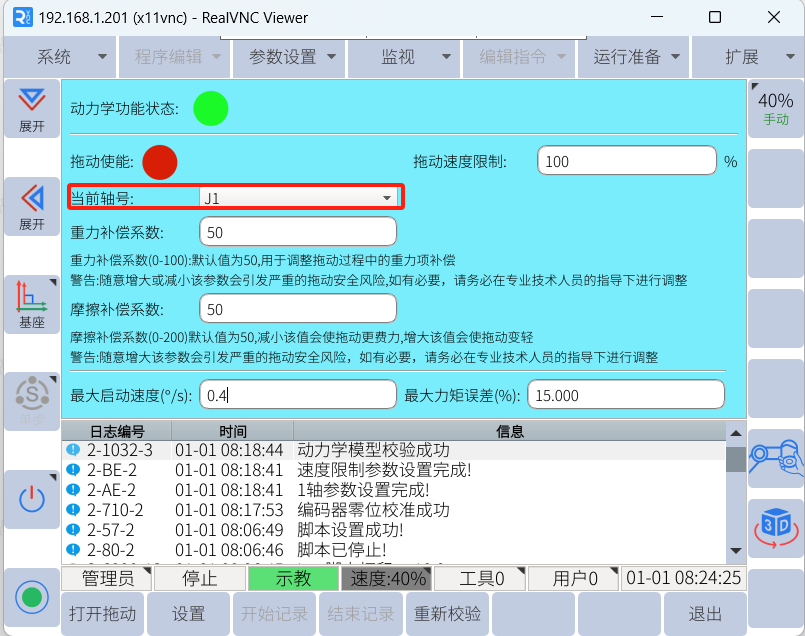
2.3当前轴号
设置参数的时候切记要记得设置轴号,选择哪个轴,你设置的参数就会作用在该轴上,并不是设置一个参数,所以轴的参数都会改变。
注:很多人都会忘记看轴号,然后设置完参数再拖动,觉得参数设置是整体化的。也无需每个关节都设置一遍。使用时根据具体情况设置合适的参数。
2.4重力系数
定义:是机器人受到重力作用相对大小的参数。
当我们把负载的质量和重心设置到理论时,打开拖动使能开关,机器人某关节出现自动向下落的情况,可以将该参数调大,直至机器人稳定不下落,默认50。
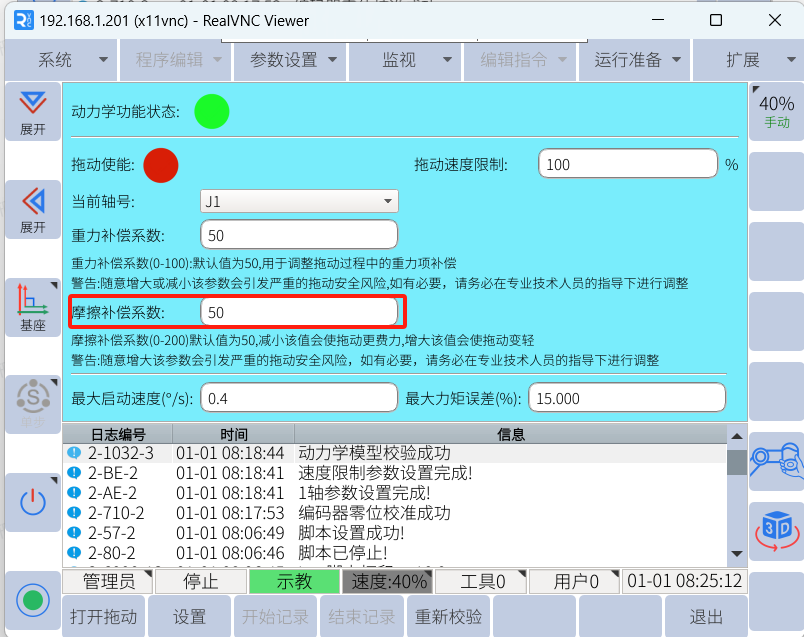
2.5摩擦补偿系数
定义:该参数是改变拖动时轴与轴之间的摩擦力大小。
打开拖动,拖动某个关节时感觉摩擦力较大,拖动比较费力,可将该轴的摩擦补偿系数调大,参数值越大,摩擦力越小,拖动越轻松。数值设置的越小,摩擦力越大,拖动越吃力。默认值为 50,建议可设置 60-90 之间,不建议设置到 100,默认50。
2.6 最大启动速度
定义:打开拖动后一段时间 (100ms)内机器人的移动速度。
当该速度大于所设置的速度时,系统提示“拖动启动速度异常”。建议设置 0.4--0.8,默认 0.4。
2.7最大力矩误差
定义:是调整实际力矩超出标准力矩大小的部分占标准力矩的百分比。
误差百分比不能设置过大,否则安全校验会失效。有可能在【实际已经卸掉了负载,但负载参数还在】的情况下,拖动发生飞车情况。默认15
2.8常见故障答疑
打开拖动后与打开拖动前的力矩差值占打开前力矩的百分比当该百分比大于所设置的百分比时,拖动使能不会被打开且系统提示“力矩校验失败,无法打开拖动”。造成的原因: 安装方式、负载、零位、连杆长度、额定转矩、减速比、机器人类型错误,这需要工程师自行判断。


























