
















EC机器人30,100报警处理
2025-01-23
1 30报警和100报警
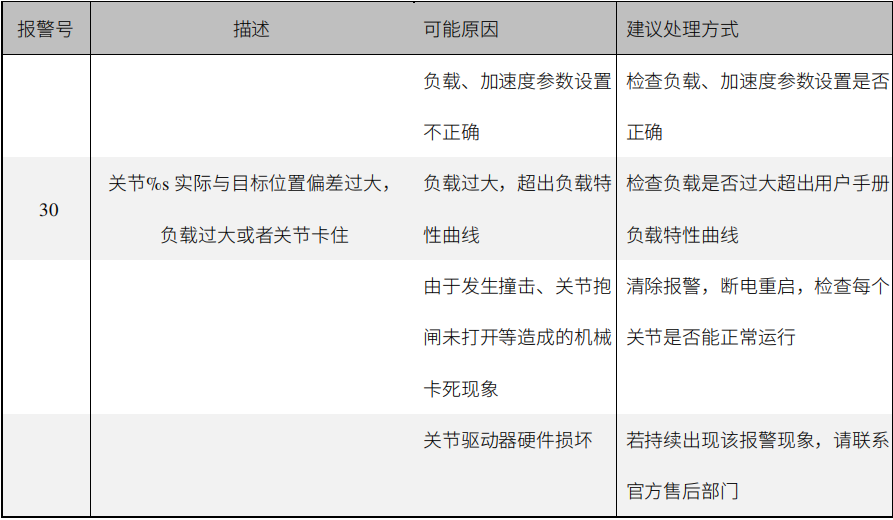
报警代码:伺服故障码:30,关节3实际与目标位置偏差过大,负载过大或者关节卡住
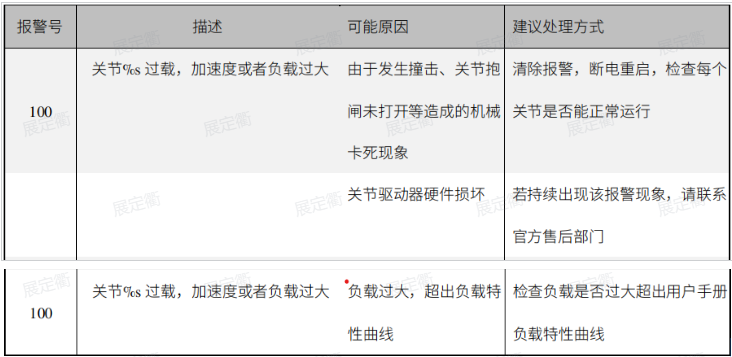
报警代码:100关节%s 过载,加速度或者负载过大
1.1 30报警和100报警原因分析
原因1:负载或者加速度参数设置不正确,太小或太大。
原因2:检查机械臂是否碰撞,或者憋住了。
原因3:关节抱闸未打开。
原因4:关节机械卡死,或者里面的机械结构卡死。
原因5:关节内部脏污,光编污染,或者驱动器硬件损坏。
1.2 排查方法
1.2.1 工具准备
1. 内六角扳手一套(用于拆卸关节端盖)
2. 十字螺丝刀(用于拆卸电磁铁固定片)
3. 镊子(必要时用)
1.2.2 排查步骤
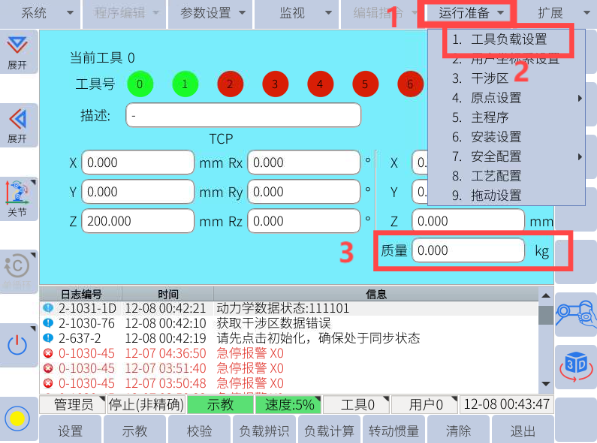
步骤一:排查机械臂负载是否设置正确。负载太大或者太小有报警30的风险。可以在运行准备界面-----工具负载设置界面,里面的质量那里检查负载参数。再坚持程序里面指令加减速是否正常。
步骤二:检查机械臂螺丝是否松动。是关节连接处螺丝是否松了,导致关节连接螺丝与上面的螺丝发生碰撞,出现100报警。
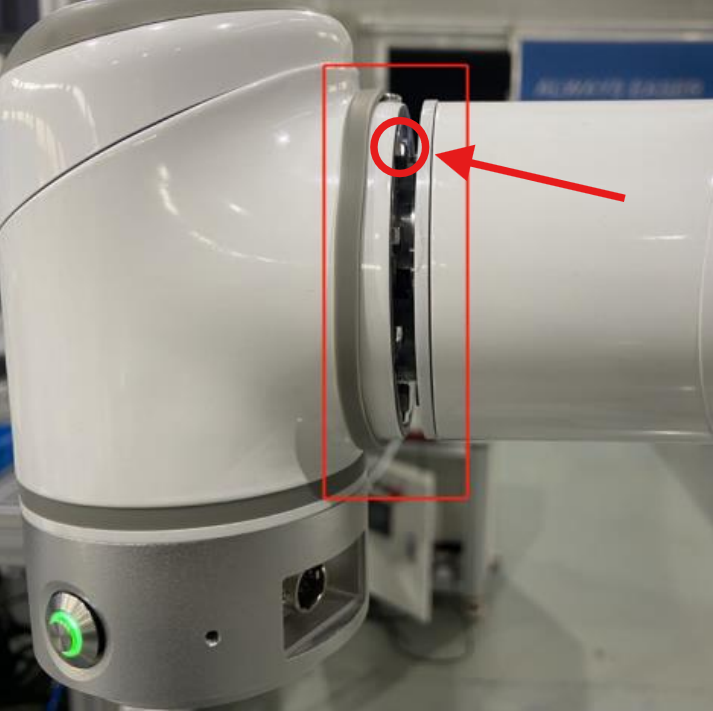
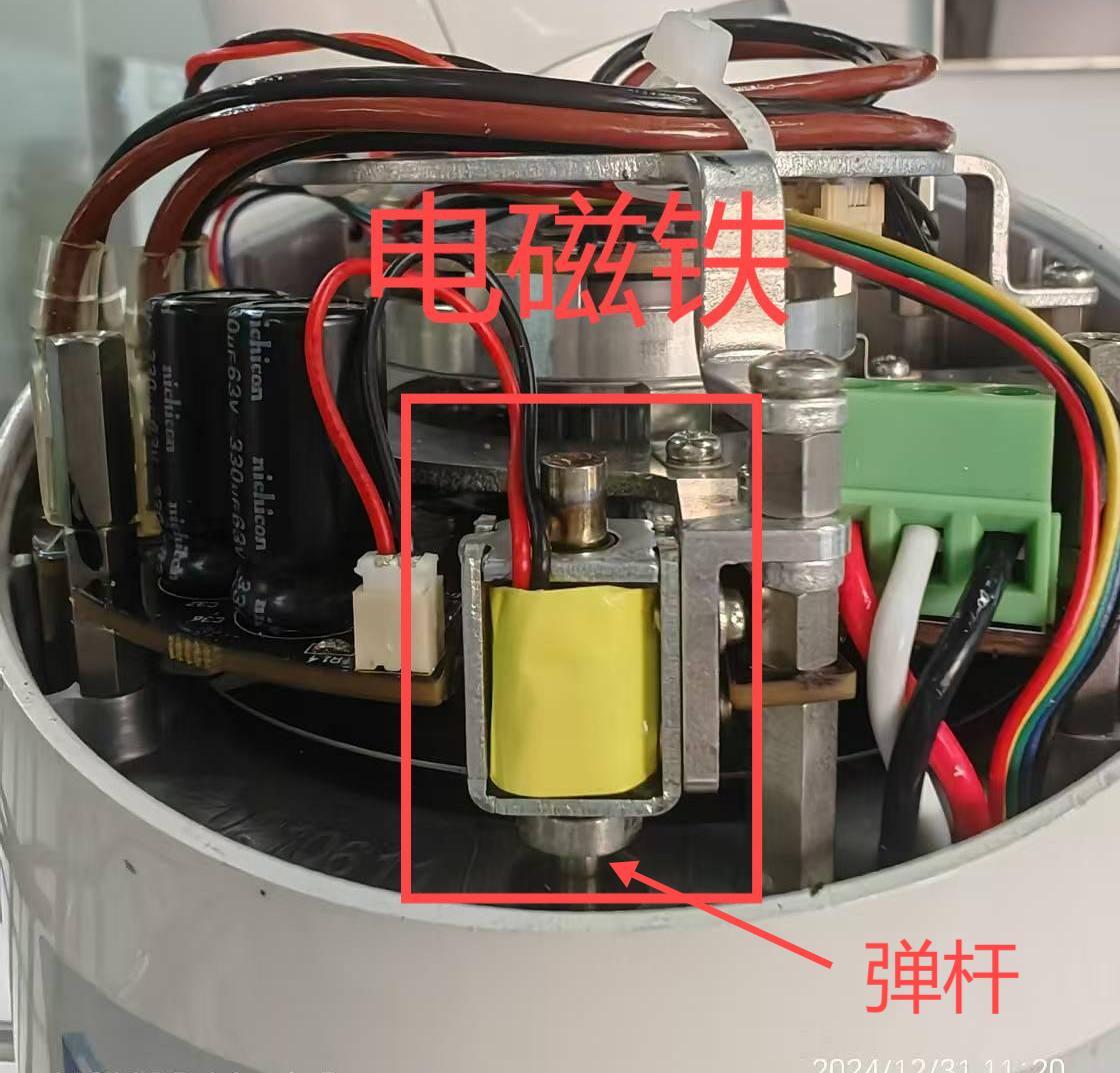
步骤三:检查电磁铁抱闸和减速机是否正常。1.关闭电源,将故障关节的端盖打开,检查电磁铁的弹杆是否卡死或者弹杆掉落。
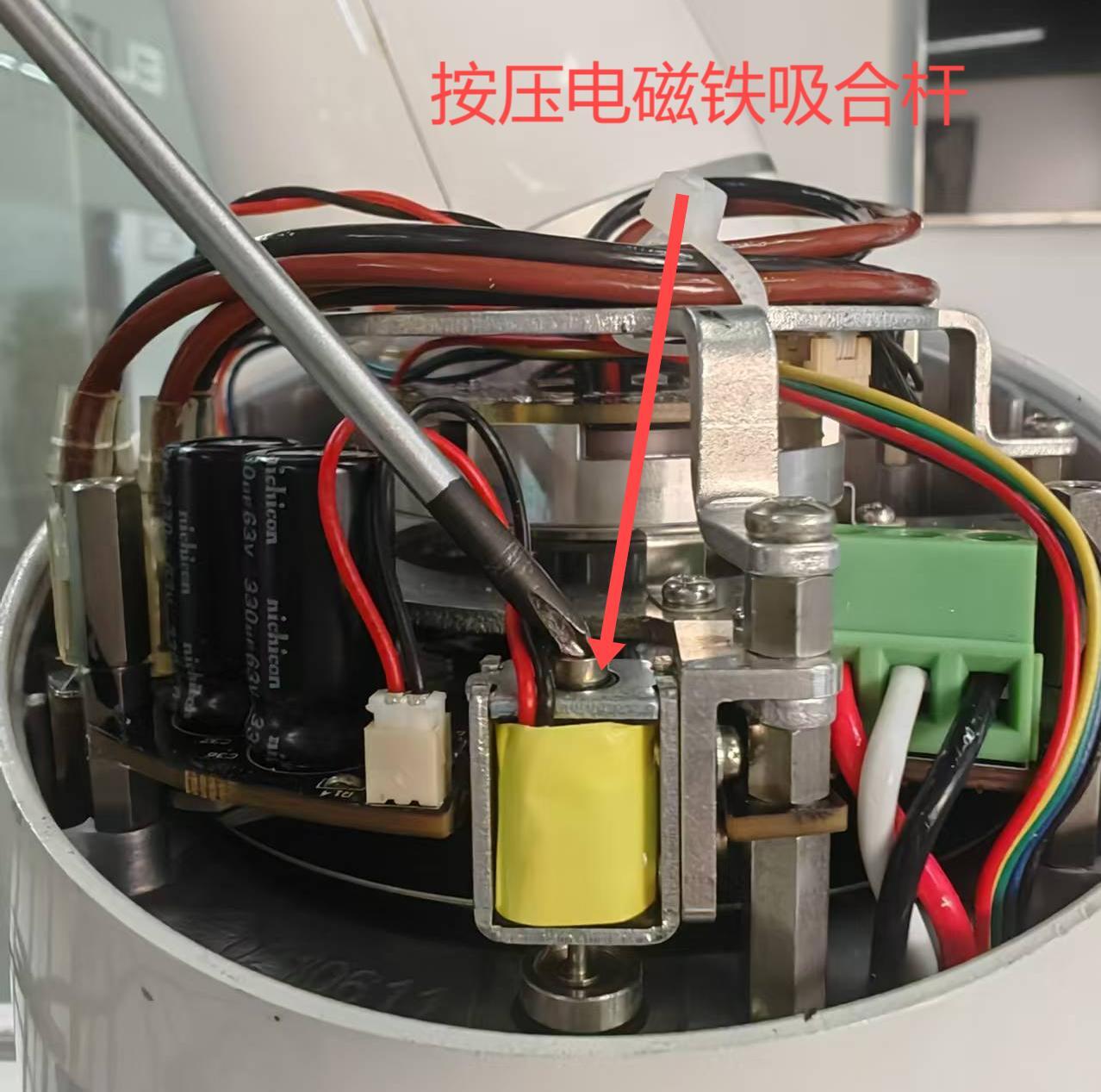
2.减速机损坏,导致关节内部卡死,按压电磁铁,手动转动该关节,看是否有卡顿,如果卡顿,说明减速机损坏。
步骤四:检查驱动板是否故障,如果故障会导致电磁铁无法吸合,导致30碰撞报警。查看驱动板指示灯是否正常(红蓝常亮)。
步骤五:检查报警30的同时是否伴有70,71,72报警,如果有,就是光编污染了。关节内部脏污,参数异常导致的位置超差,引起的30或100报警。
2. 100报警与30报警的区别
100报警多描述外部碰撞原因导致的,30报警多描述参数异常原因导致的,如果发生报警后看谁先报警,也会单独报警,按顺序排查报警原因。


























