
















EC机器人90,91,92,100报警处理
1. 报警内容简介
报警代码:90,91,92报警主要是关节刹车抱闸故障导致。关节抱闸位置见下图。
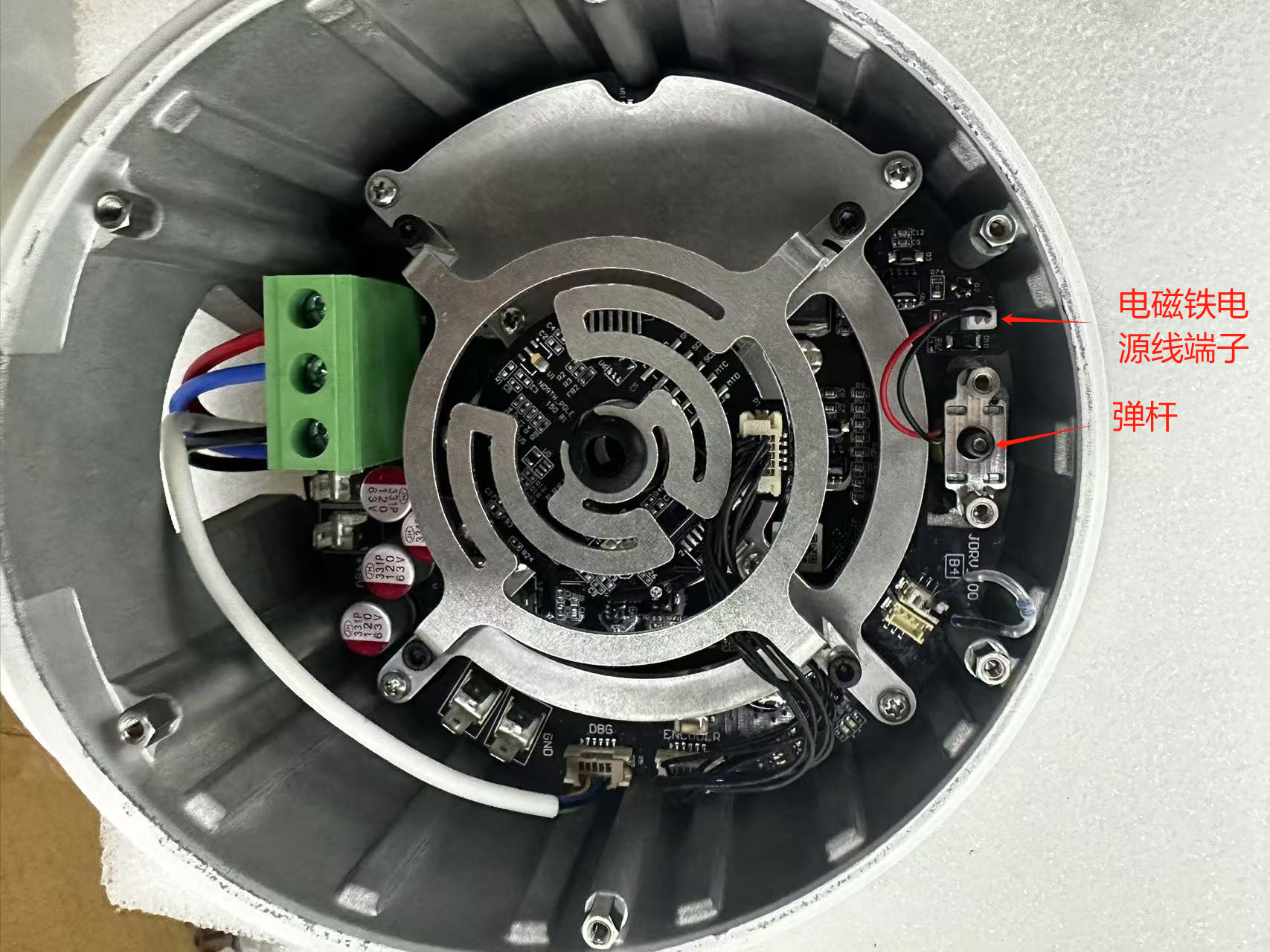
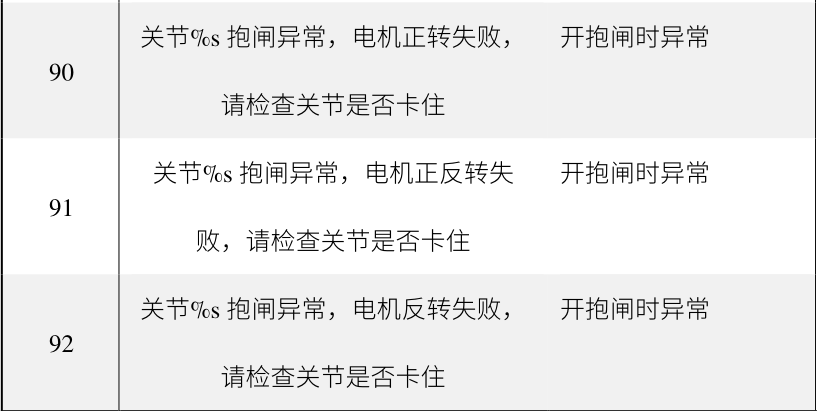
● 90,91,92报警
报警内容:释放抱闸异常
报警原因:关节打开抱闸时,电机会正反微动,确保抱闸系统正常开启。同时判断能否正反两个方向能否正常运动。该故障提示正向或反向无法运动。
故障点:根据报警代码可大致判断机器人故障点:1.弹杆弯曲无法吸合。2.电磁铁故障。
3.驱动板故障。
● 100报警
报警内容: 1.过载参数设置不正确。2.负载参数设置不正确。3.加速度参数设置不正确。4.负载太大。5.发生撞击、憋堵。6.关节抱闸未打开。7.关节机械卡死。
报警原因:1.检查过载报警水平和过载延迟时间设置。2.检查负载参数设置,断电重启后重试。3.检查加速度参数设置,断电重启后重试。4.检查负载大小,断电重启后重试。5.检查是否发生撞击、憋住。6和7报警内容可参考90,91,92处理方式。
2. 排查问题方法
● 准备工具
1. 内六角扳手一套(用于拆卸关节端盖)
2. 5.0套筒工具(用于拆卸螺柱)
3. 小十字螺丝刀(用于拆卸电磁铁固定片)
4. 镊子(必要时用)
● 第一步:排查弹杆是否弯曲
1. 机器人断电
2. 使用内六角扳手拆下机器人关节端盖
3. 机器人上电,如一直报警90,91,92,使用清除报警查看弹杆是否吸合,如不会吸合则进行下一步,如机器人偶发性报警,可以手动旋转此关节±360°一遍,复现此报警
4. 机器人断电,用手按压弹杆,看看按下去后是否会弹起,如不会弹起或者不顺滑可以确定是弹杆弯曲或卡住
● 第二步:排查电磁铁故障or驱动板故障
1. 使用套筒工具拆卸关节内螺柱,如下图
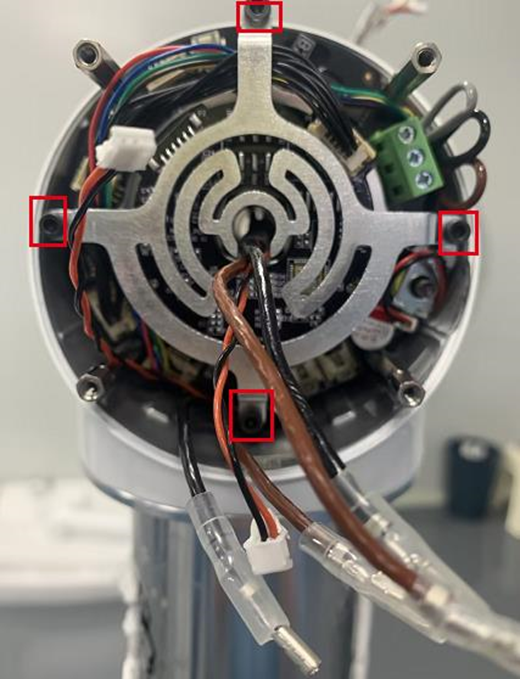
2. 拆下四颗螺丝后,将四角支架旋转一点,可以看到刹车抱闸还有一颗外六角螺丝,并将此螺丝松开。注意:小心别把线束扯断,如线束较紧,可以先把线束拆下,如上图。
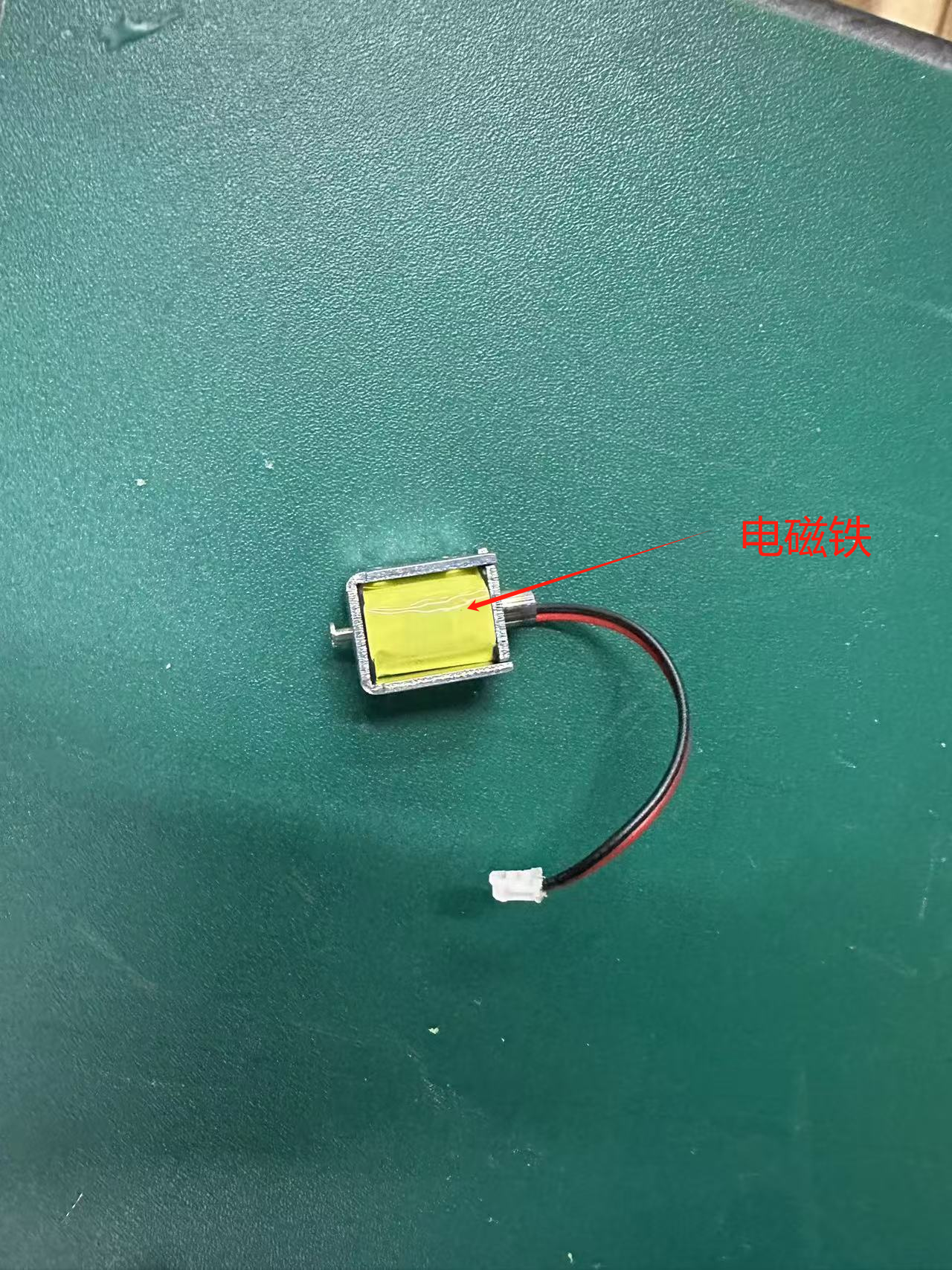
3. 拔下电磁铁电源线,小心不要用力拔,可以轻微晃动后再拔。
4. 将电磁铁从关节内取出,注意:电磁铁下面还有一个弹杆,弹杆下有弹簧,没有电磁铁弹杆顶着,机器人如果是倒装会掉出来,下面的弹杆不需要取出。
5. 将其他关节内的电磁铁取出,装到此故障关节上,接好线后通电。
6. 机器人上电后通过拍急停和清除急停报警,查看弹杆是否是急停时抬起,清除报警后弹杆降落,重复几次。如正常无报警可以手动移动此关节±360°。依旧无报警即可确定电磁铁故障,如还有报警90,91,92,便是驱动板故障。
● 第三步:特殊情况
如果机器人报警70时,同时报警90,91,92,100的话,可先查看机器人关节脉冲,如果差值较大,则优先排查70报警,其他报警是由70引起。


























