
















EC机器人套圈处理
1. 简介
机器人在老版本(2.16 及以下)升级或更换控制柜后可能会出现套圈,也就是当前关节角度和之前相差 360 度,这时机器人会超软极限报警,无法运行。
2. 操作流程
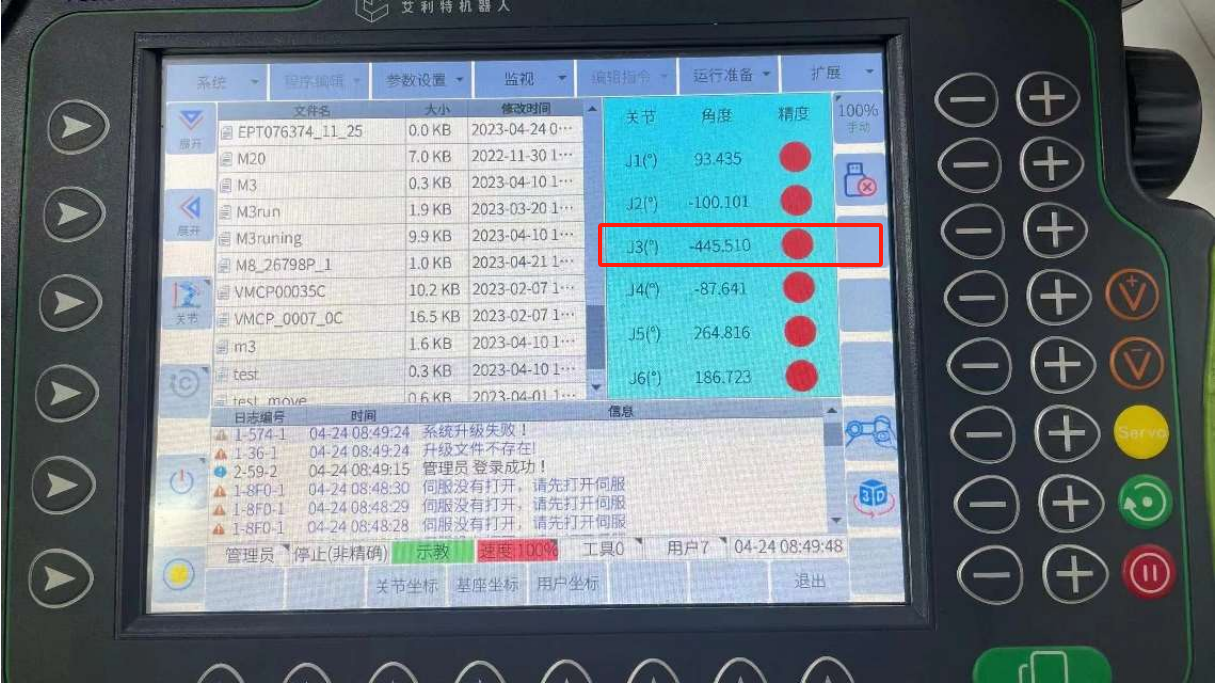
下图是机器人更换控制柜后迁移恢复时套圈,3轴比原先的角度减少了360°。
在示教器上,先切换成管理员模式,再点击:运行准备-原点设置-机械原点,可以进入机械零点界面。
方法一:直接修改关节
请优先使用第一种方法
首先进入管理员模式
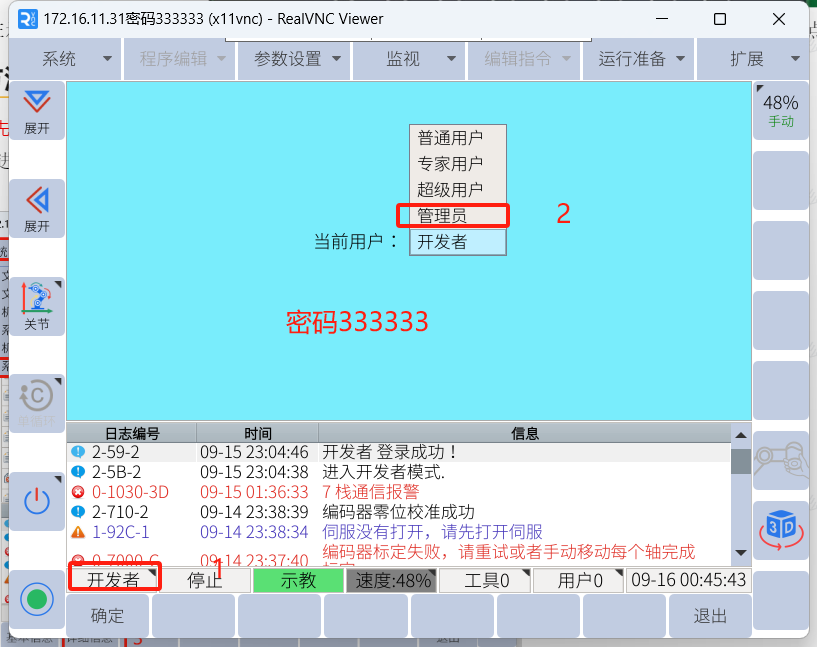
在管理员模式下再进入开发者模式

开发者模式密码:123456


进入机械零点界面后,可直接修改关节,比如下图三轴为-445.5度。

显然该关节往负方向套了360度,则修改此关节-445.5+360=-85.5度。修改完成后,机器人回零;检查零位姿态是否正确。

如果某个轴回零状态为517度(大于360度),则该关节也是正方向套圈,实际角度需要减去360度:517-360=157度。
方法二:修改机器人脉冲
首先进入管理员模式
在管理员模式下再进入开发者模式
开发者模式密码:123456
先用手机对零点界面拍照,把六个关节的零点脉冲都拍照记录下来。然后在示教器上对套圈超限关节点击:记录。这时该关节角度会变成零点位置的角度,且该关节的零点脉冲值会改变,机器人可以手动运行。

手动将机器人移至机械零点附近,见下图。姿态大致一样就行。
先进入开发者模式。
在机械零点附近,把零点脉冲修改为原来拍照的值。确认当前关节角度是否在零点附近。如果在,说明套圈已解决。如果不在,与零点位置角度相差约360°,再进行下一步操作。

确认超限关节角度是往正还是负超了360°,如果是负方向,可以再次点击:记录。把当前关节角度置零位,然后往正方向转45度,然后再改回原来的零点脉冲,这时当前关节角度约-315°,再把当前位设置到P变量,并把该P变量的第3关节角度改成-360°,走到该P点位,这个位置刚好是机器人机械零位,再次点击该关节的“记录”,会把该关节角度设成零点角度,这时就可以正常运行了。如果是正方向超360°,可以那就向负方向旋转后再操作。
套圈处理原则:
1. 点击机械零点界面的“记录”,可以把当前关节角度置零位,机器人正常运行,注意先拍照机械零点脉冲。
2. 手动把机器人移至零点附近(手臂向上垂直),修改成原来的机械零点脉冲,这是套圈大概率可以解决。
3. 如果不能解决的,就把机器人超套圈反方向旋转一个角度后,修改成原来的机械零点脉冲,再走到与机械零位角度差360°的位置,这个位置就是关节的实际零位,记录下这个值,零点脉冲变化,关节角度置零位,套圈问题解决。
如果还是没法解决则需要联系艾利特工程师


























