
















EC机器人撞机卡死处理方式
2025-01-23
1. 简介
本篇文档详细描述了EC机器人因各种原因造成的机器人卡死现象的处理方法。
2. 操作流程
当机器人受到撞击、或者其他外力因素导致机器人持续受到一定外部力导致持续触发碰撞报警时。
更具撞击程度和报警类型分为一下几种处理方式:
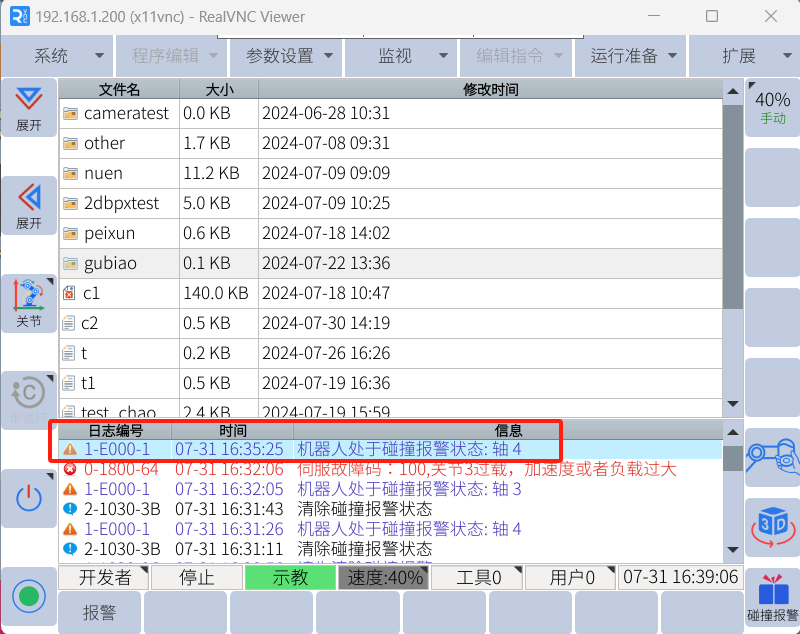
1、蓝色碰撞报警为系统设置灵敏度主动触发,清除报警后反向移动可脱离卡死。
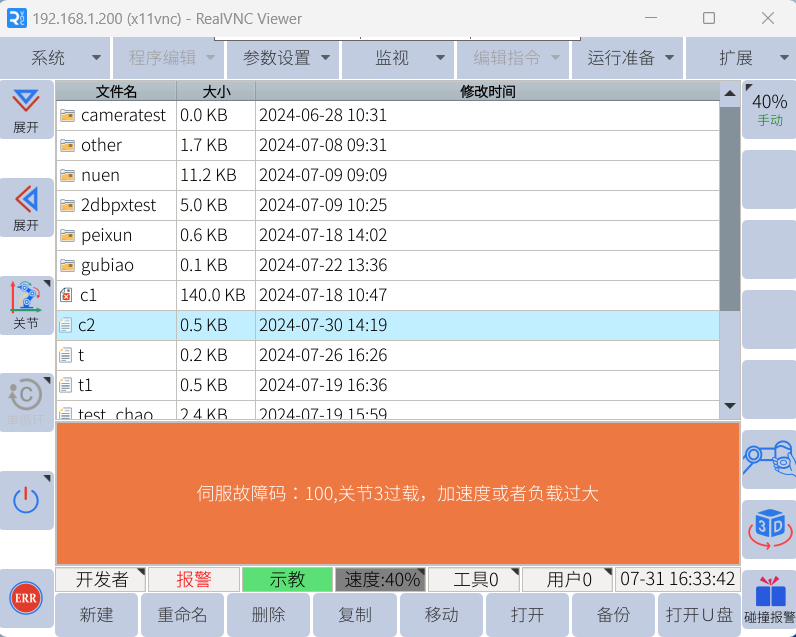
2、伺服故障100为机器人系统报警,如果无法清除报警可先降低或者关闭碰撞报警灵敏度后反向移动机器人脱离卡死。
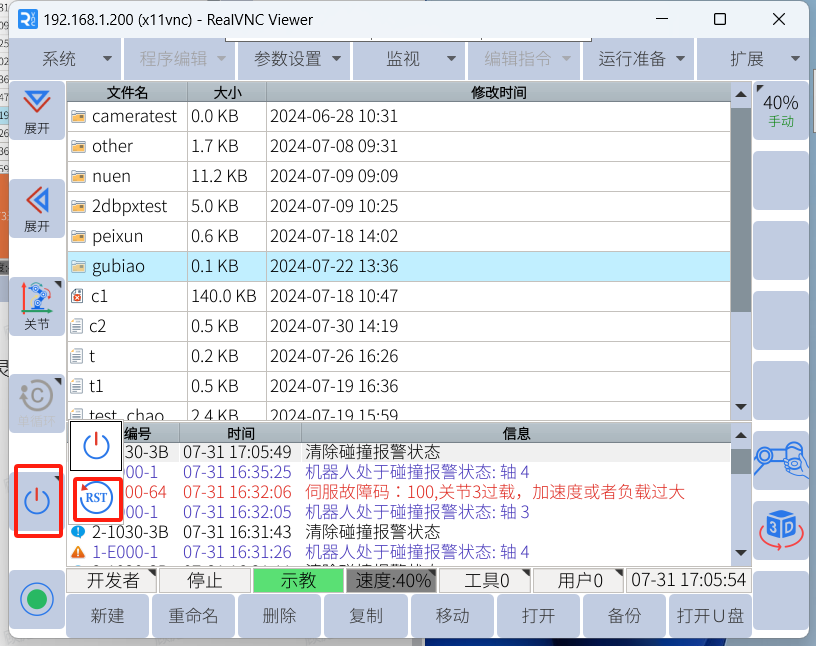
3、当报警无法清除,或机器人无法上伺服时:
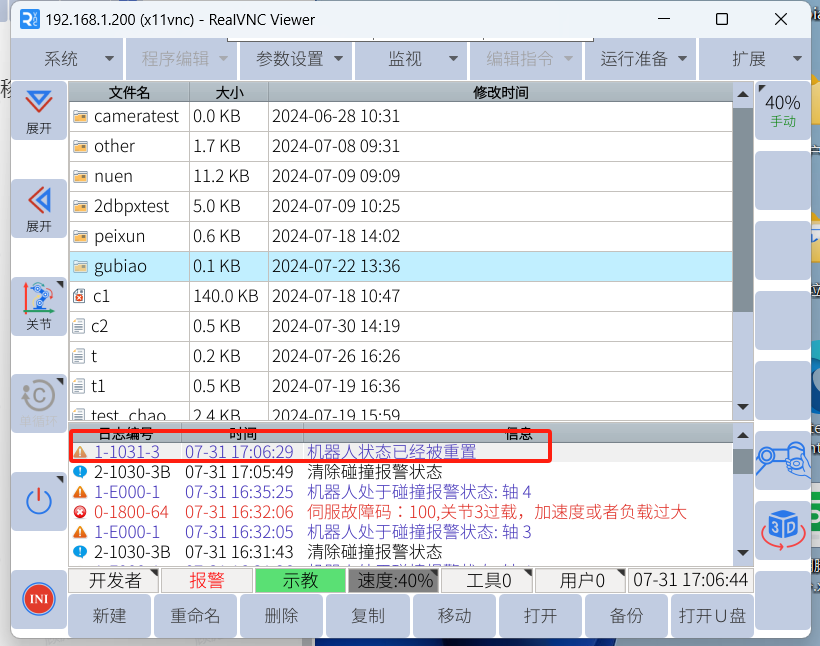
按以下操作先重置系统状态:启动按键→RST
再按下图进入反向驱动模式:启动按键→BKD


警告:进入反向驱动前请扶好机器人。
在进入以下界面后可以对卡死关节进行拖拽。

在反向驱动下拖拽的时候刚开始要用的力大一些;然后会听到关节内有抱闸打开的声音(声音像是电磁铁吸合的声音)。示教器界面上会发现拖拽的关节会变绿。

在该状态下如果不扶好机器人,松开抱闸关节会缓慢重力向下掉落。当机器人反向驱动脱离卡死后应该点击退出。
警告:如果三关节卡死,反复用较大的力无法启动反向驱动的时候;先尝试用相同的力去拽动其他轴使机器人脱困;当拽动机器人某关节发现机器人整体结构发生很大形变的时候,应停止反向驱动。
如果无法进入反向驱动,或机器人无法上电,或者因为各种原因导致机器人无法脱离卡死的可以把机器人端盖拆开;将电磁铁往下压,往下压后可以转动该轴。

注意:通讯报警下无法进入反向驱动模式。


























