
















EC机器人通讯报警排查
1. 简介
适用客户现场机器人通讯报警可通过此文档排查步骤排查EC系列通讯报警。排查步骤尽可能对通讯报警问题定位。
2. 机器人通讯故障排查
2.1 1栈通讯报警。

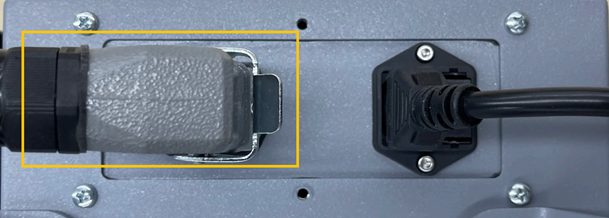
1. 检查本体连接控制柜的线有没有插好或断电重新插拔。
2. 检查接地线,如果有io通讯用继电器隔离一下或拔掉外接io运行试试是否还会报警。
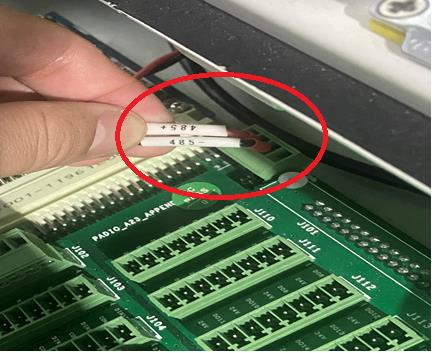
3. 检查控制柜 I/0 板上 485 端子接口是否插好,可尝试重新插拔。
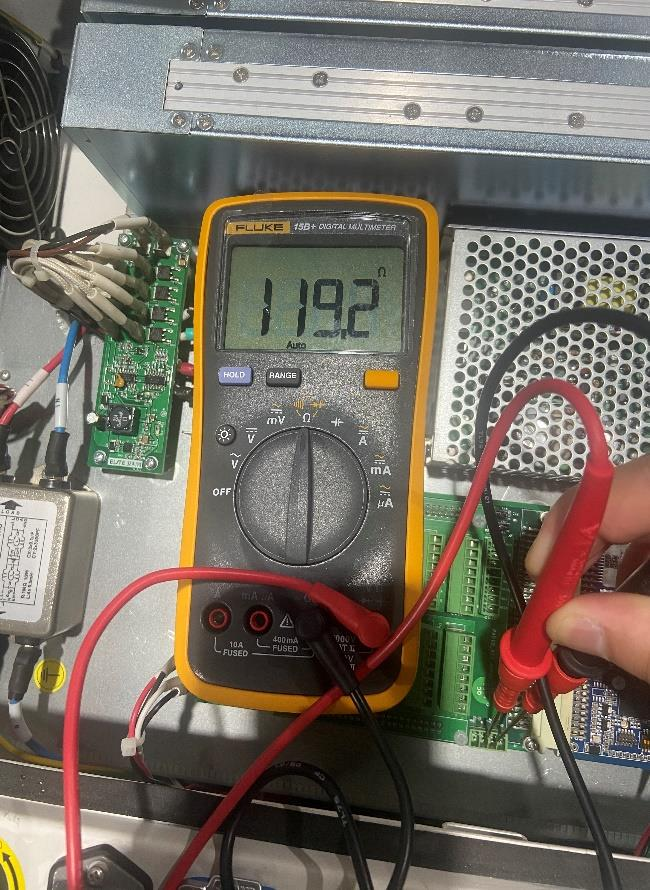
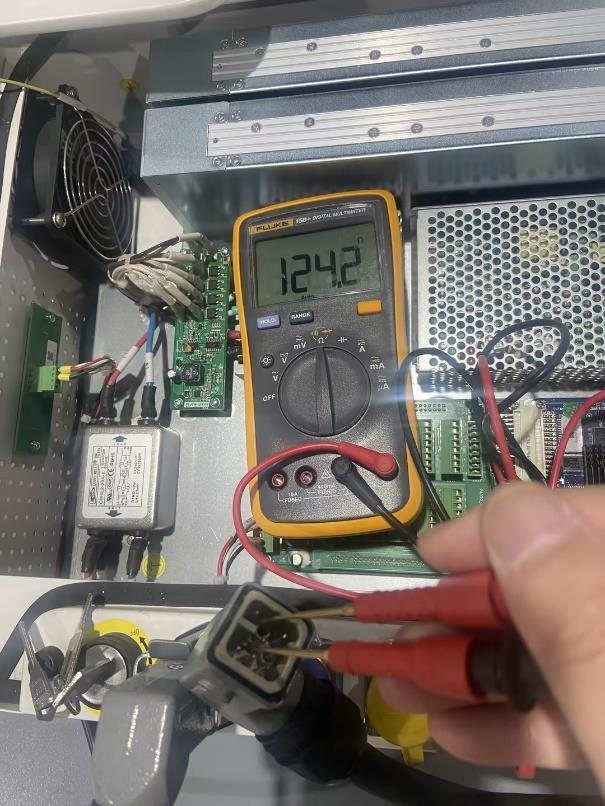
4. 万用表测量控制柜 I/O 板上 485 母座和本体端子阻抗都为 120 欧姆左右为正常值(两端连接阻抗值各60 欧),若 I/0 板端阻抗值异常可能是 I/0 板故障。
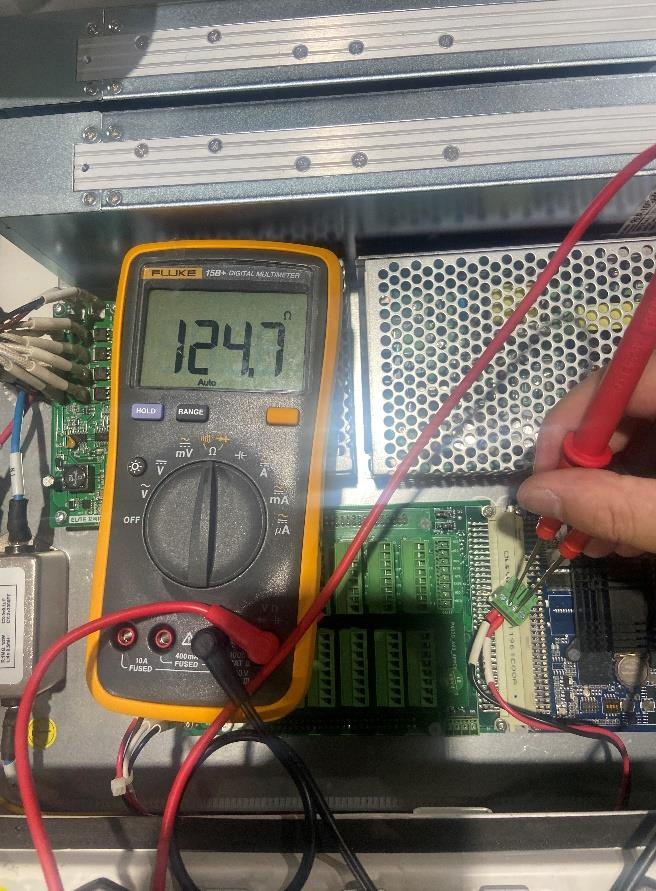
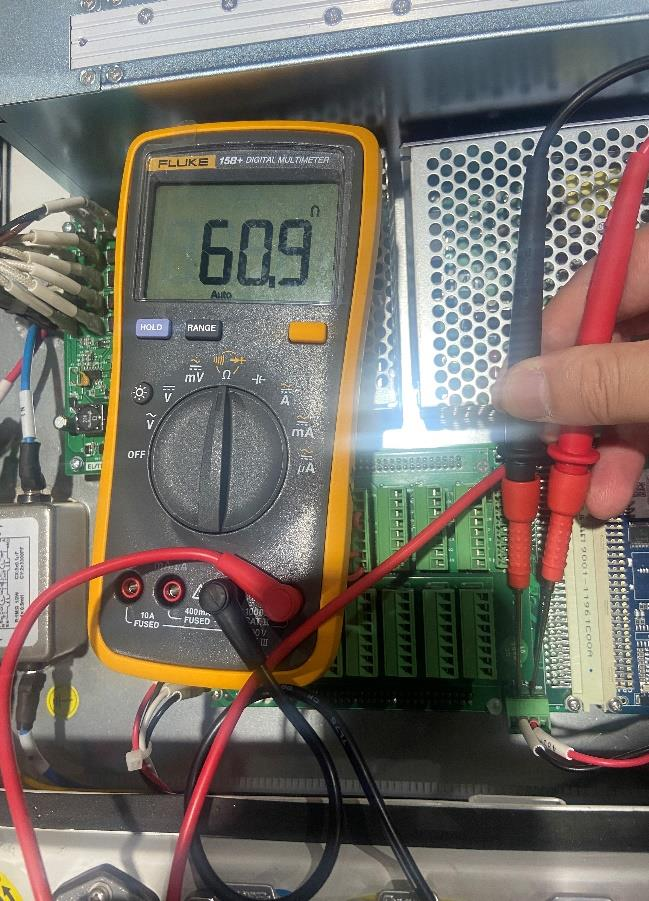
5.使用万用表测量本体到控制柜连接线接口(3.4pin 针),是否有 120 欧左右阻抗值。若阻抗值异常检查可能是机器人本体485 连接双绞线故障。可拆开各端盖测量每个轴通讯连接线。

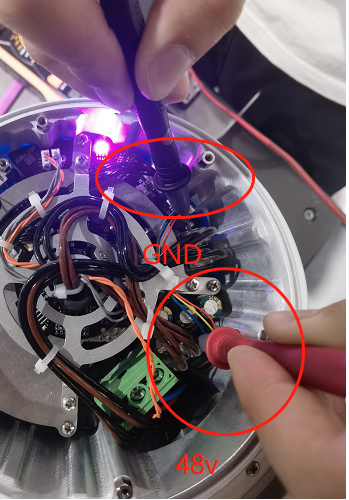
6. 拆开端盖检查1轴驱动板上指示灯是否正常亮起和测量电压是否正常48v。如电压不正常可能是电源线缆或驱动板电源芯片故障导致无法正常供电。棕线端子是48V,黑线端子是GND。
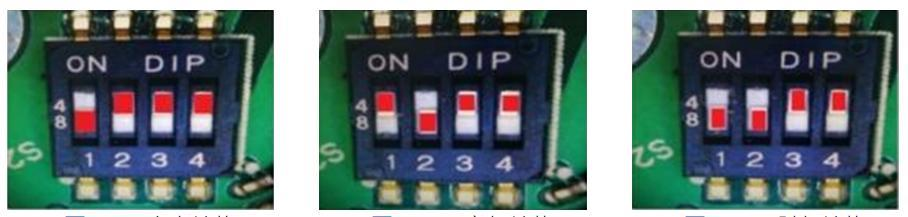
7. 重新将拨码开关拨码。
2.1 1-7 栈通讯报警,随机报警。
1.检查控制柜 I/0 板上 485 端子接口是否插好,可尝试重新插拔。
2.万用表测量控制柜 I/O 板上 485 母座和本体端子阻抗都为 120 欧姆左右为正常值(两端连接阻抗值各60 欧),若 I/0 板端阻抗值异常可能是 I/0 板故障。
3.末端故障。屏蔽末端io看看报警是否消除。
2.3 7栈通讯报警
1. 屏蔽末端查看是否还会报警。
2. 如有外部设备卸掉外部设备观察是否还会报警。
2.4 单一关节栈报警
1. 检查是否是485 线缆或端子松动从而引发报警。
2. 使用万用表蜂鸣档测量报警关节与前1关节485通讯线是否导通正常。
3. 测量报警关节电源供电是否正常或驱动板故障。
4.检查拨码开关是否正常或重新拨码。
一轴 二轴 三轴
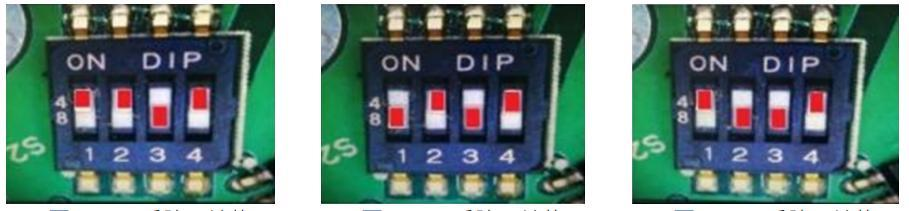
四轴 五轴 六轴
2.5 50.51通讯异常报警
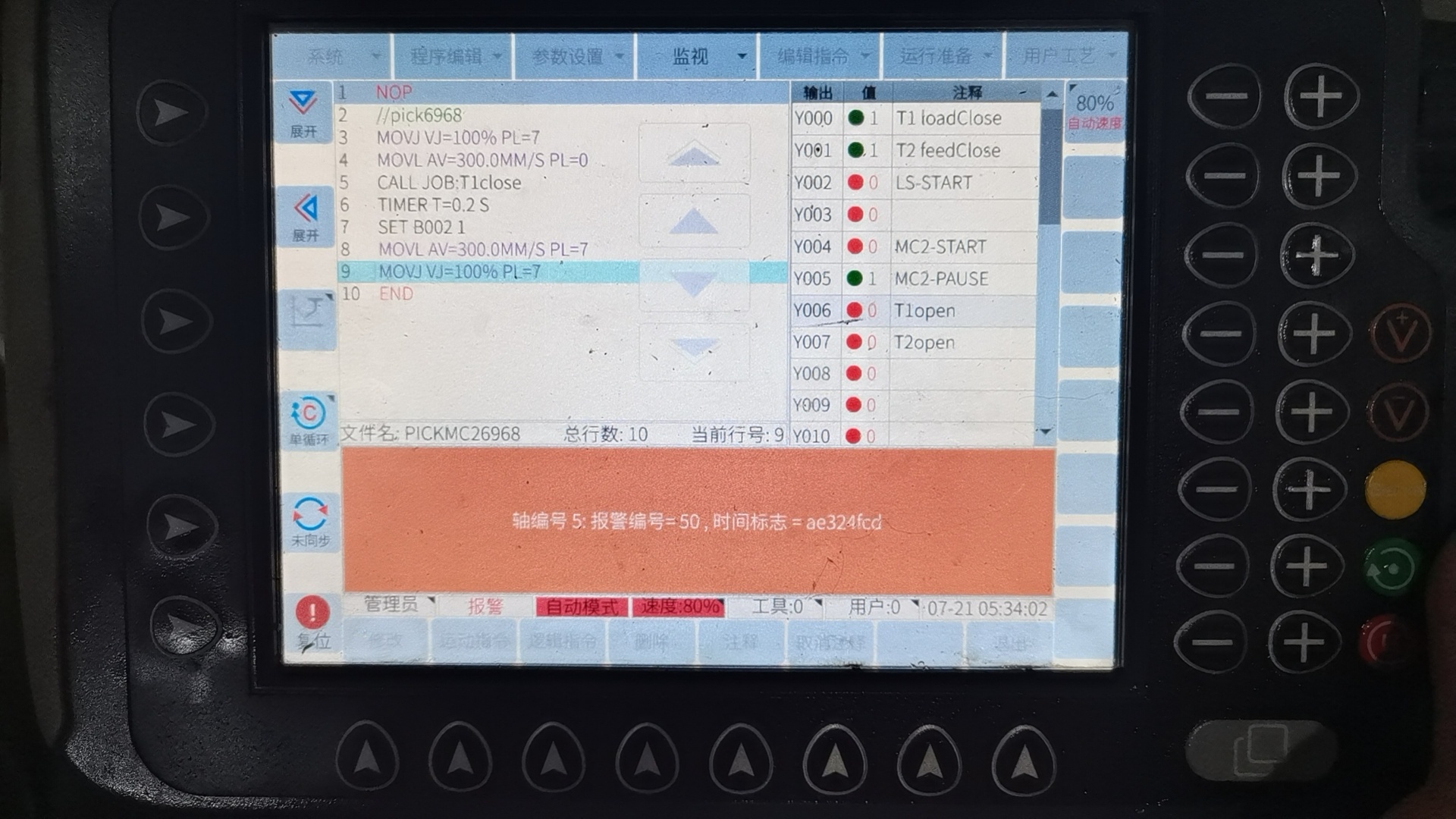
50通讯异常报警:通信校验失败。检查通信线缆是否松动,检查走线上是否强弱电分开,检查接地系统。
51通讯异常报警:通信同步中或同步失败,该报警为警告,检查并处理除该警告以外的其它报警。检查拨码开关是否正常,重新拨码或重新插拔485通讯双绞线。


























