
















EC机器人换机流程
1. 简介
现场可能会由于故障等原因导致需要更换机器人本体或者控制柜以及两者都需要更换,本篇文档适用于现场更换机器人本体以及控制柜的操作流程步骤。
2. 更换操作流程
准备工作:格式为FAT32的U盘,M8内六角扳手
2.1更换机器人本体步骤流程
2.1.1拆除本体外部设备或工装确保无干涉回零位。

2.1.2运行至打包姿态,记录基座本体线位置。安装新机本体线缆与旧机要一致。打包文件程序文件名如EC612(612_packing_angle_cn)。
2.1.3新本体的DH参数,零点脉冲,这个可以找艾利特技术,或者艾利特售后提供。
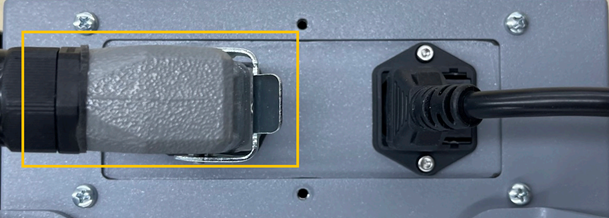
2.1.4记录好旧机零点脉冲和DH参数后断电拔除电源线,控制柜与本体连接线。新机换上重新恢复接入电源线,控制柜与本体连接线。
A1柜接口

B1,B2柜接口

2.1.5更换本体安装完成后使用factory_mode适配文件放置u盘根目录下插上控制柜USB接口上电。factory_mode.key,重新上电后会弹出输入机器人序列号界面,输入本体铭牌序列号后点击确定进入。
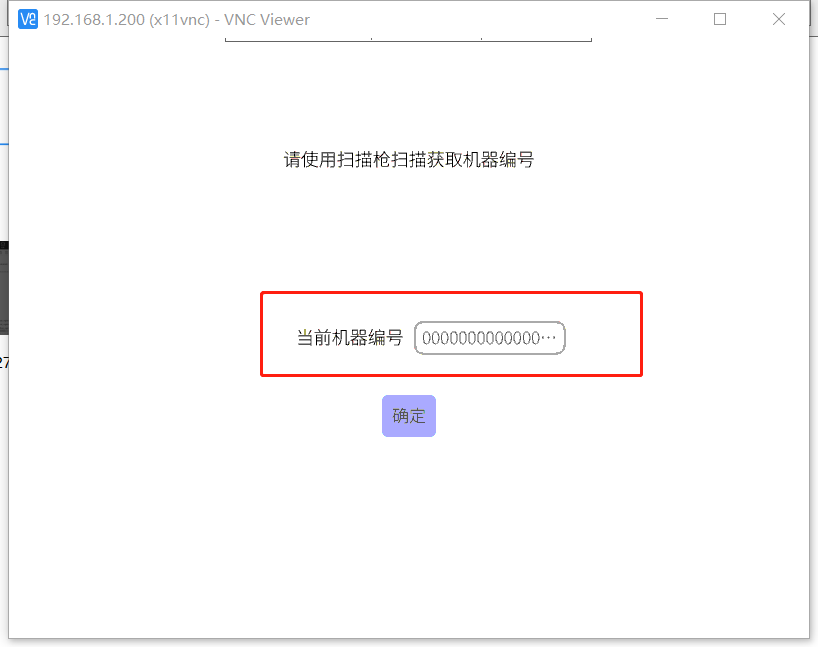
A1柜USB接口

B1,B2柜USB接口

2.1.6零位恢复
修改零点脉冲需要先登录开发者模式。
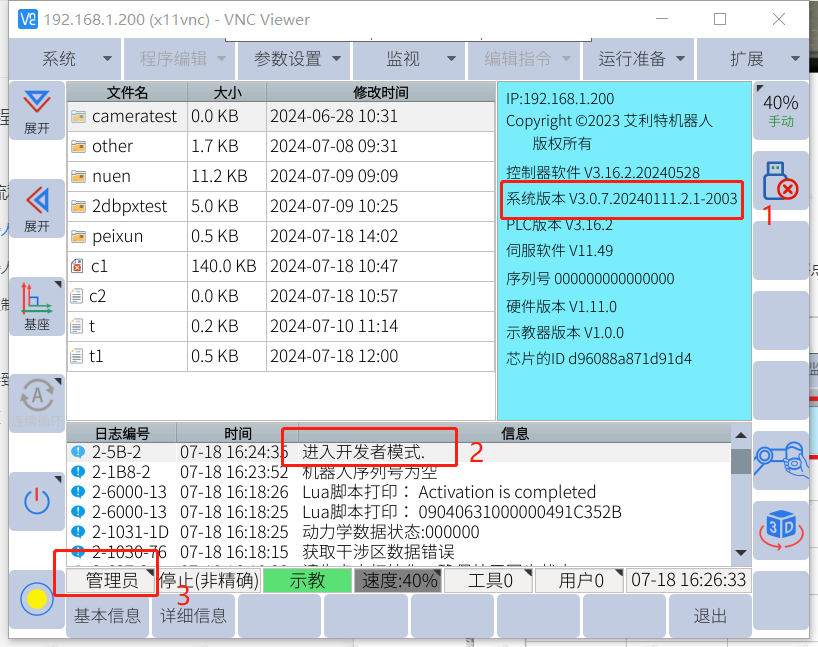
打开开发者模式。在管理员模式下点击系统-系统信息
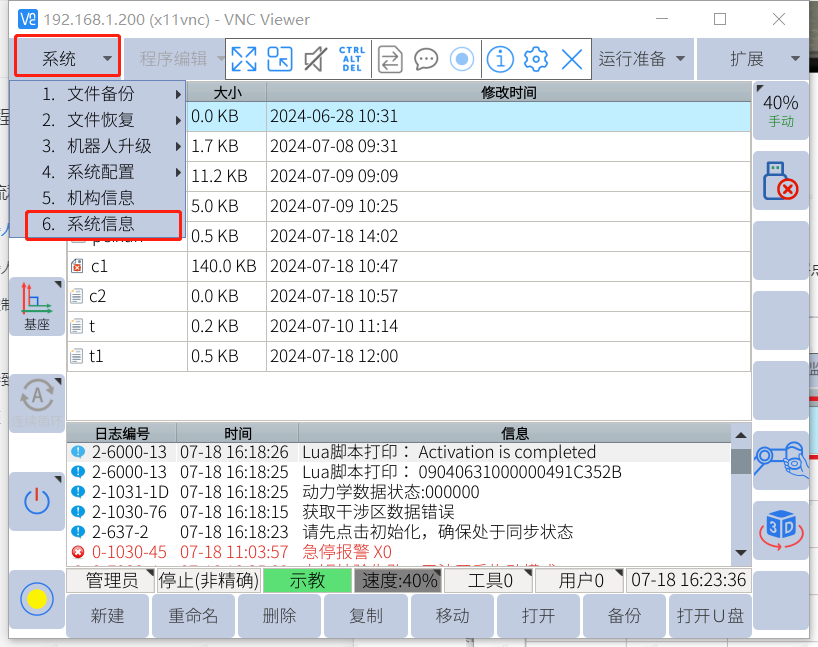
点击左下角详细信息
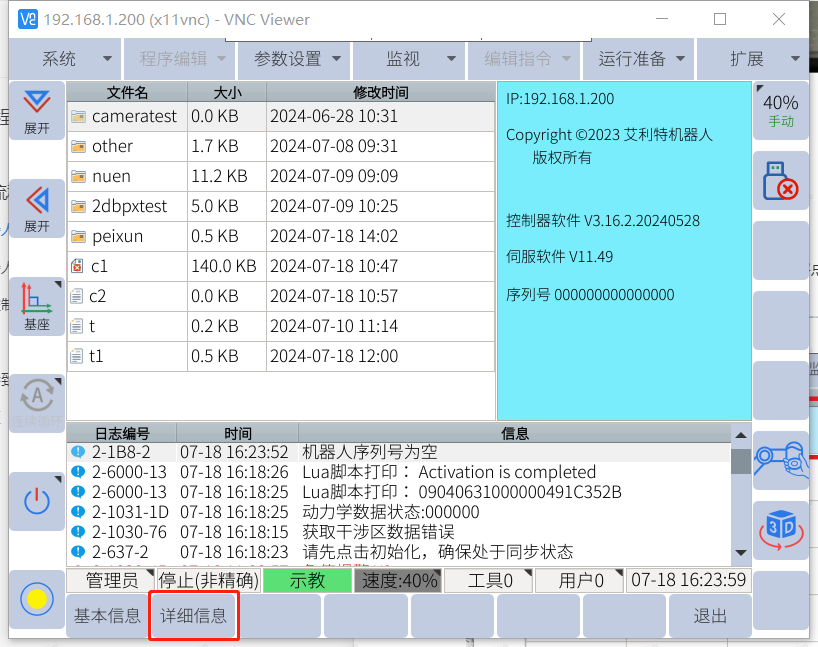
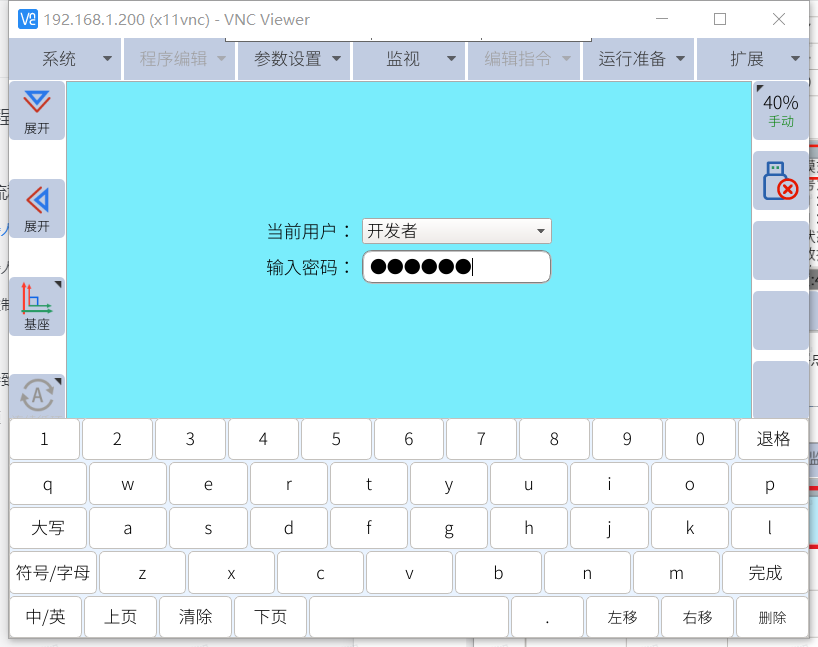
多次点击系统版本触摸位置,等待提示框出现进入开发者模式。点击管理员切换开发者模式,登录密码123456.
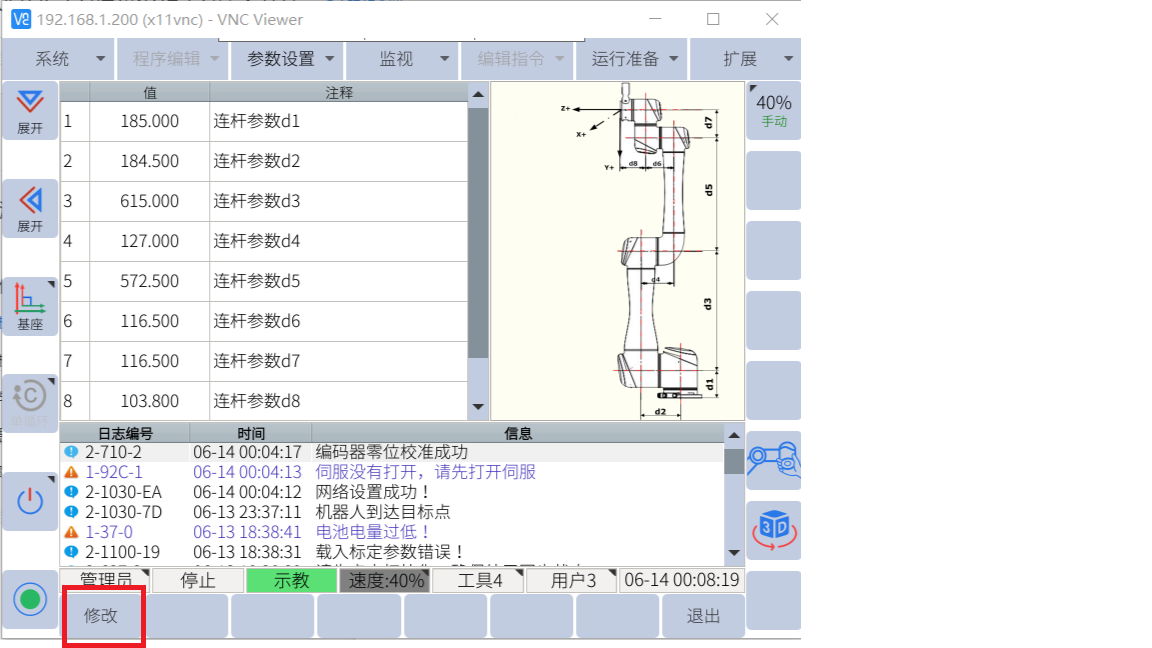
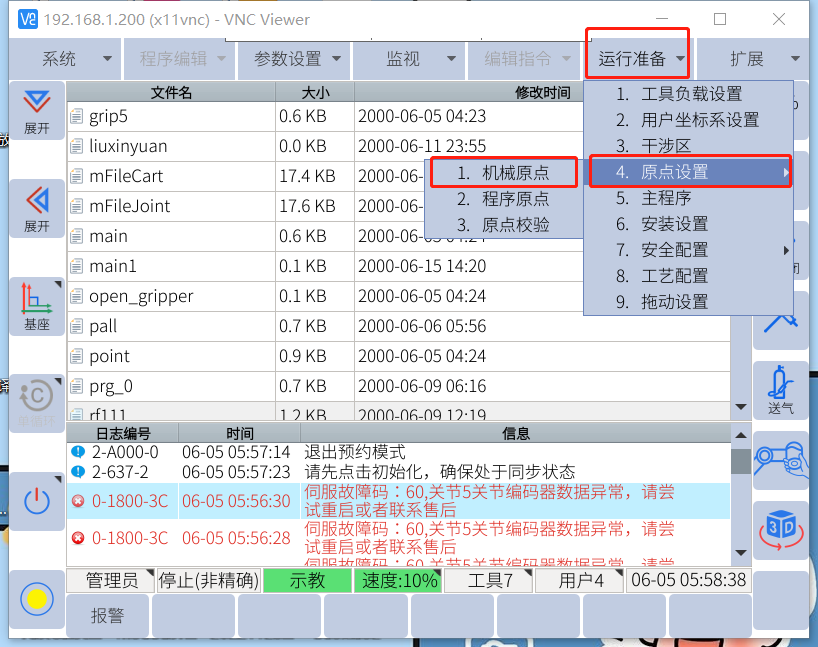
进入开发者后。点击运行准备-原点设置-机械原点,将拍照记录的新机零点脉冲-DH参数重新输入后记录。修改零点脉冲步骤如下

点击-参数设置-机械臂DH
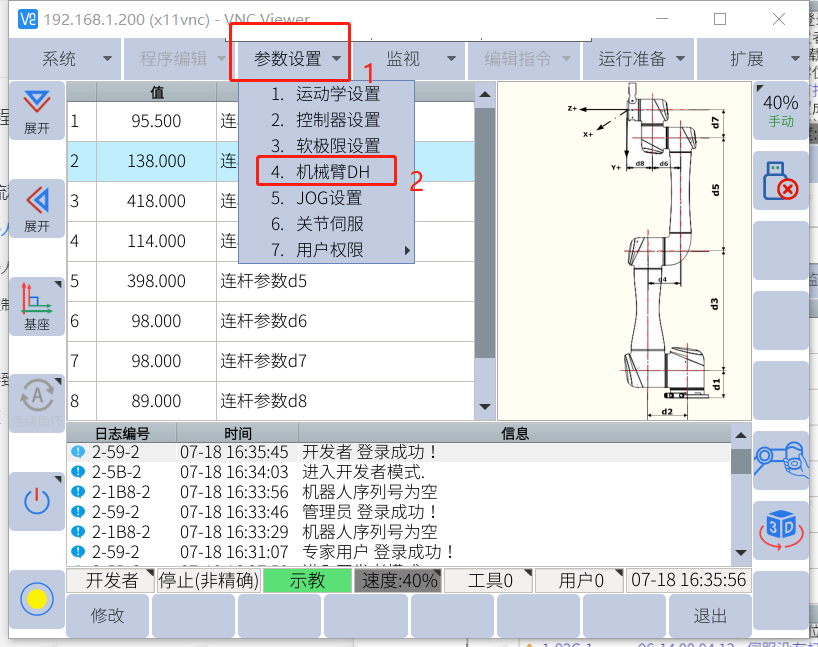

零点脉冲与DH参数断电重启后恢复使用。
2.1.7包装箱表面写上维修单号,等待运输回厂
2.2更换机器人控制柜步骤流程
2.2.1备份文件(迁移备份)
准备工作:格式为FAT32的U盘
确保U盘识别,界面点击系统-文件备份-迁移备份,等待提示备份完成。如下图步骤。

2.2.2回机械原点,断开电源拔出电源线,控制柜与本体连接线,拔除网线及io外部接线并做好记录。更换控制柜后恢复插好本体线电源线及网线io接线。
2.2.3更换控制柜安装完成后使用factory_mode适配文件放置u盘根目录下插上控制柜USB接口上电。factory_mode.key(如需此文件,请联系艾利特技术人员)。重新上电后会弹出输入机器人序列号界面,输入本体铭牌序列号后点击确定进入。
A1柜USB接口

B1,B2柜USB接口
2.2.4文件恢复(迁移恢复)
文件恢复,将保存备份文件U盘插入控制柜。示教器界面点击系统-文件恢复-迁移恢复,提示完成后恢复使用。

2.2.5包装箱表面写上维修RMA单号,等待运输回厂。
2.3本体与控制柜一起更换步骤流程
准备工作:格式为FAT32的U盘,M8内六角扳手
2.3.1备份文件
将U盘插入控制柜USB接口,确保U盘正常识别,示教器界面点击系统-文件备份-备份用户数据备份及全局变量备份。记录机器人网口IP,主程序名。(单独记录)

记录新机器DH参数。-点击参数设置-机械臂DH,并拍照记录。

2.3.2拆除本体外部设备或工装回机器人打包姿态打包文件程序文件名如EC612(612_packing_angle_cn),记录好基座本体线位置。
2.3.3断开电源拔出电源线,控制柜与本体连接线,拔除网线及io外部接线并做好记录。更换控制柜后恢复插好本体线电源线及网线io接线。
A1柜接口

B1,B2柜接口
2.3.4文件恢复
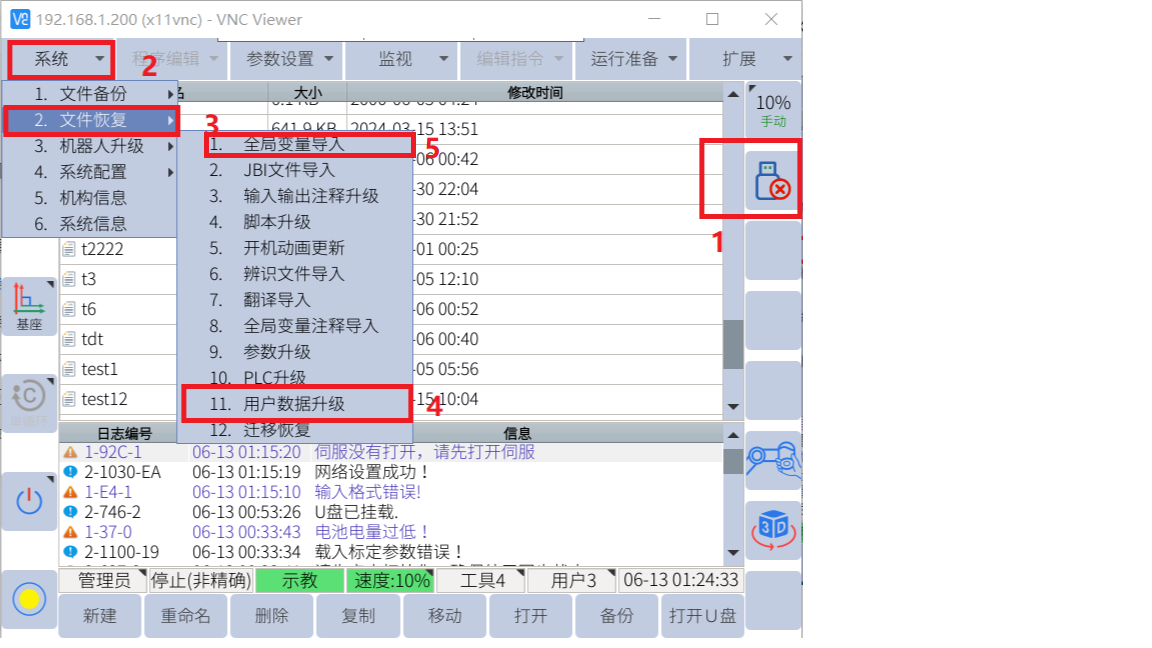
更换好成套机器人后开机将原来程序数据导入新机,将存有文件U盘插入控制柜,示教器界面点击系统-文件恢复-用户数据升级和全局变量导入

DH参数修改,因用户数据备份包含DH参数,用户数据备份到新机后,新机DH参数会被旧机覆盖,需将DH参数改回。
点击-参数设置-机械臂DH进行修改
DH参数修改后重启恢复使用。
2.3.5包装箱表面写上维修单号,等待运输回厂
3. 常见问题
3.1因故障导致机器卡死无法示教关节运动或抱闸故障无法运行至打包姿态
3.1.1使用反向驱动,
控制器版本 V3.1.2,伺服版本 V11.37 及以上版本机器人反向驱动
示教器界面使用方法: 用户可点击![]() ,再点击 ,在弹出页面
,再点击 ,在弹出页面 点击“确定”,此时信息栏提示: 机器人状态已经被重置,再点击 ,在弹出页面
点击“确定”,此时信息栏提示: 机器人状态已经被重置,再点击 ,在弹出页面 点击“确定”。
点击“确定”。

进入反向驱动状态。手动可以掰动机器人至需要姿态后,点击“退出”

V3.1 以下软件版本机器人使用关节制动器释放
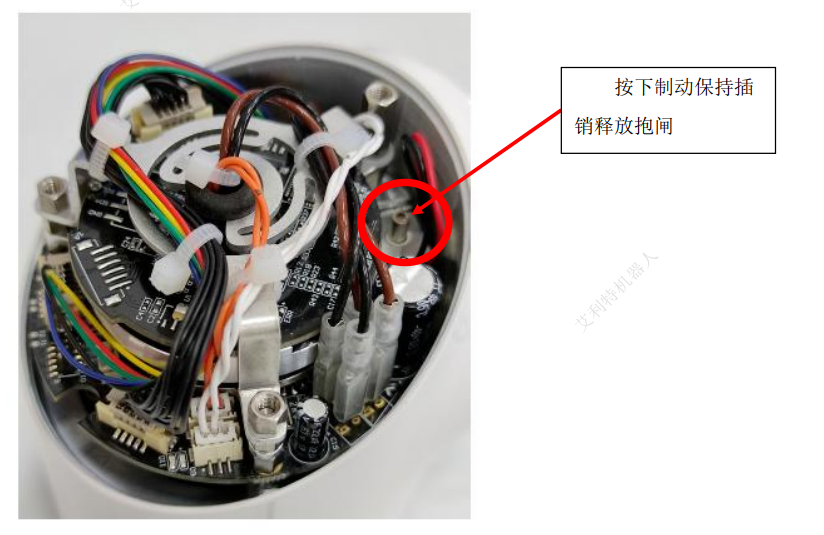
3.1.2关节制动器释放
V3.1 以下软件版本机器人反向驱动V3.1 以下版本无反向驱动模式,如遇紧急情况请立即按下紧急停止按钮切断电源,移除 相应的关节盖,并释放制动保持插销,让关节自由移动。
3.2套圈问题
进入机械零点界面 在示教器上,先切换成开发者模式,再点击:运行准备-原点设置-机械原点,可以进入 机械零点界面
将套圈超限的关节角度置零位 先用手机对零点界面拍照,把六个关节的零点脉冲都拍照记录下来。然后在示教器上对套圈超限关节点击记录。这时该关节角度会变成零点位置的角度,且该关节的零点脉冲值会改变,机器人可以手动运行。

手动将机器人移至机械零点附近,见下图 。姿态大致一样就行。

在机械零点附近,把零点脉冲修改为原来拍照的值。确认当前关节角度是否在零点附近。如果在,说明套圈已解决。如果不在,与零点位置角度相差约 360°,再进行下一步 操作。

确认超限关节角度是往正还是负超了 360°,如果是负方向,可以再次点击记录。把当前关节角度置零位,然后往正方向转 45 度,然后再改回原来的零点脉冲,这时当前关节角度约-315°,再把当前位设置到 P 变量,并把该 P 变量的第 3 关节角度改成-360°,走到该 P 点位,这个位置刚好是机器人机械零位,再次点击该关节的“记录”,会把该关节角度设成 零点角度,这时就可以正常运行了。如果是正方向超 360°,可以那就向负方向旋转后再操作。


























