
















CS机器人撞机卡死处理
1. 简介
机器人撞机后由于和外部接触一直反馈一定的扭力,机器人会一直报警不能进行移动和拖动情况下,需要进入反向驱动模式或关闭碰撞检测。建议优先考虑使用“反向驱动”
反向驱动:反向驱动功能可以用于机器人解除卡死状态,进入反向驱动模式时,机器人可以直接使用手进行拖动移出碰撞区域。
碰撞检测:当机器人本体上电外力超过用户安全设置的正常受力范围时,机器人本体自动停止,以防机器人或操作人员碰撞受伤。
2. 操作流程
2.1. 电磁抱闸-机器人进入“反向驱动”
● 机器人进入下图界面,点击 “打开电源“

● 机器人显示”待机“状态后退出,进入运行页面,切换状态
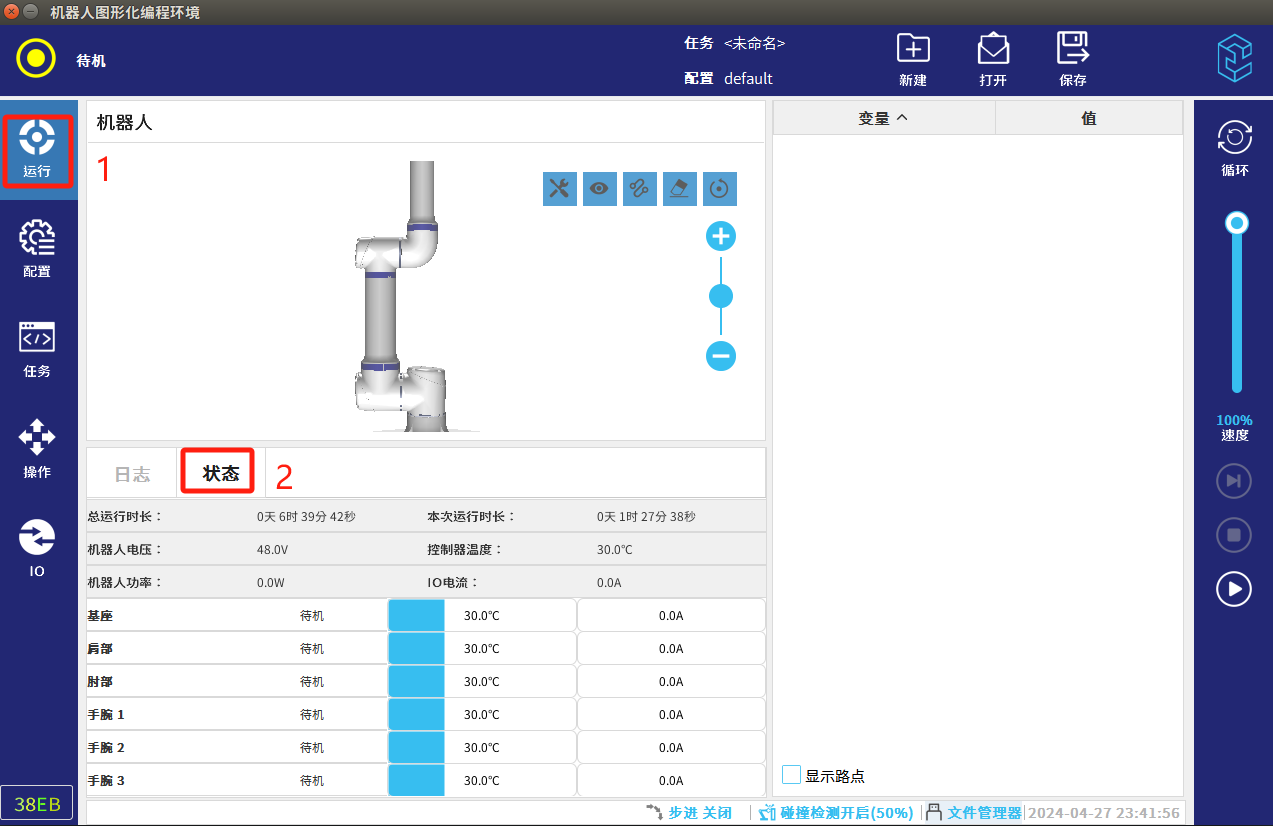
● 按住示教器反面的拖动使能开关,机器人即进入 “反向驱动”模式。点击开启对应轴的”反向驱动“,此时关节在重力的作用下会正常下滑,机器人可以直接使用手进行拖动。

● 此时跟进现场情况单独开启一个轴或多个轴反向驱动,用手进行拖动将机器手移动到安全区域。松开示教器反面的拖动使能开关,机器手电机抱闸后,再松开机器人本体防止机器臂下滑导致二次伤害。当机器人在安全区域内进入下图界面,点击 “释放抱闸“。等待页面左上角显示“正常模式”,机器人可正常使用。

2.2. 插销抱闸-机器人进入“反向驱动”
● 机器人进入下图界面,点击 “打开电源“
● 机器人显示”待机“状态后,按住示教器反面的拖动使能开关,机器人即进入 “反向驱动”模式。机器人可以直接使用手进行拖动,当受力达到一定程度后,伺服会自动松开抱闸,并被推动。
● 将机器人移动到安全区域内,然后点击 “释放抱闸“。等待页面左上角显示“正常模式”,机器人可正常使用。
2.3. 关闭碰撞检测功能
底部状态栏中设有菜单快捷键,点击

将出现一个弹框

● 机器人撞机后由于和外部接触一直反馈一定的扭力,机器人会一直报警碰撞检测。关闭碰撞检测后,可将机器人点动移开。移动前必须确认移动方向是远离撞机点,防止造成二次伤害损坏关节的电机或减速机。建议优先考虑使用“反向驱动”。
3. 常见问题解答
● 开启反向驱动后,电机释放抱闸机器人对应关节,此时关节在重力的作用下,会正常下滑。开启反向驱动前,必须做好安全防护,防止由于重力向下移动损坏设备。
● 关闭碰撞检测时,必须尽可能减小机器人的运动速度移出碰撞区域,以避免不可预知的碰撞损伤。解决后需把碰撞检测开启。


























