
















EC机器人快速修改全局变量和IO注释
1.简介
机器人在调试过程中经常会使用到全局变量和IO信号,在手动测试过程中为防止忘记变量和IO信号的功能,一般会在后面增加对应的注释,EC示教器上的全局变量(D,B,I,V,P)均可以人为修改注释(支持各类语言),数字IO,模拟量IO,M虚拟输入和输出也均支持修改注释
2. 修改注释方法
2.1示教器直接修改
示教器更改最直观,但操作比较笨重,因此仅适用于添加少量的全局变量及IO注释
具体操作方法如下(全局变量和输入输出操作方法一致,导航至对应的位置按照以下步骤进行修改即可)
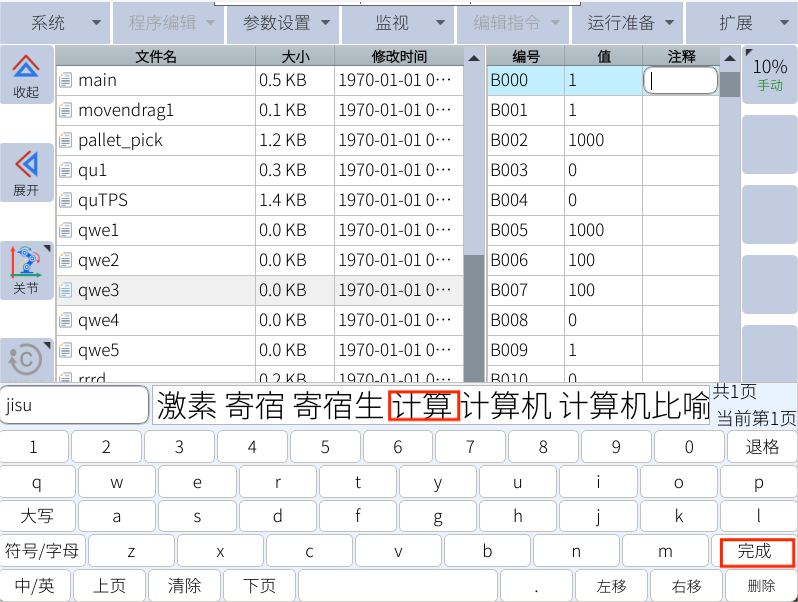
1)导航至监视-全局变量-变量B

2)选择要修改注释的变量(B000),点击左下角注释修改

3)根据所需将注释输入,输入后点击右下角完成
4)输入完成后,根据提示将修改的注释进行保存,点击确定,即注释修改完成

2.2通过文件快速更改
正常修改后的注释会存入到控制器对应的XML文件中,用户也可直接对此文件进行直接修改,修改后可再上传,以此达到快速修改注释
具体操作步骤流程如下:
- 准备一个U盘,U盘内不要有rbctrl文件夹(否则会将之前文件覆盖)
- 将U盘插入控制柜内USB口
- 示教器上导航至系统-文件备份-输入输出注释备份-全局变量注释备份

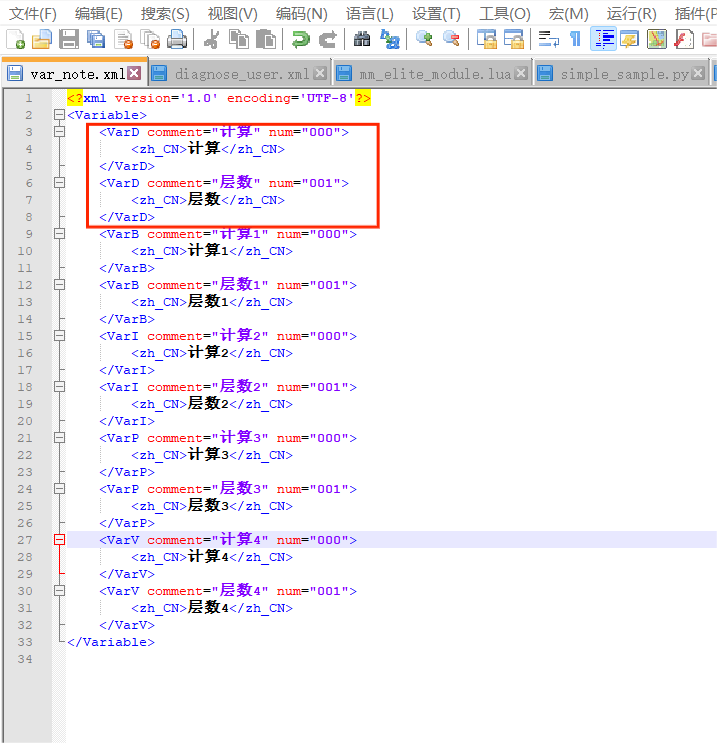
4) 备份完成后,将U盘插入电脑,U盘中自动生成rbctrl文件夹,在此文件夹下有var_note.xml和diagnose_user.xml两个文件,分别是全局变量注释文件和输入输出注释文件var_note.xml文件打开后,根据需要可在文件下进行全局变量(B、I、D、P、V)批量添加和修改
<VarD coment="计算" num="000">
<zh_CN>计算<zh_CN></VarD>
代表全局D变量的D000注释为计算
B、I、P、V变量如上类似
可参考下图进行依次添加修改
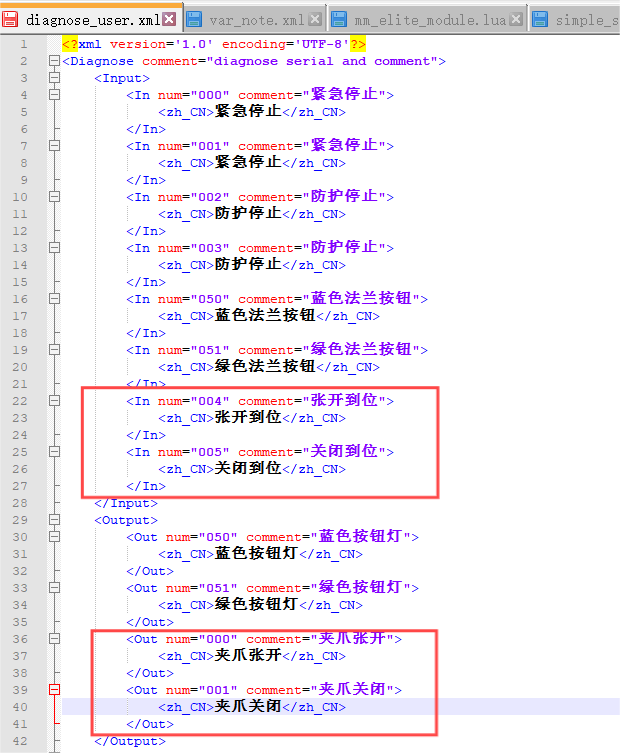
6)diagnose_user.xml文件打开后,根据需要可在文件下进行对应数字、虚拟、模拟量的输入输注释修改
Input代表数字输入信号注释,004开始,代表X4数字信号注释
Output代表数字输出信号注释,000开始,代表Y0数字信号注释
数字输入输出可参考下图所示,对应顺序依次添加
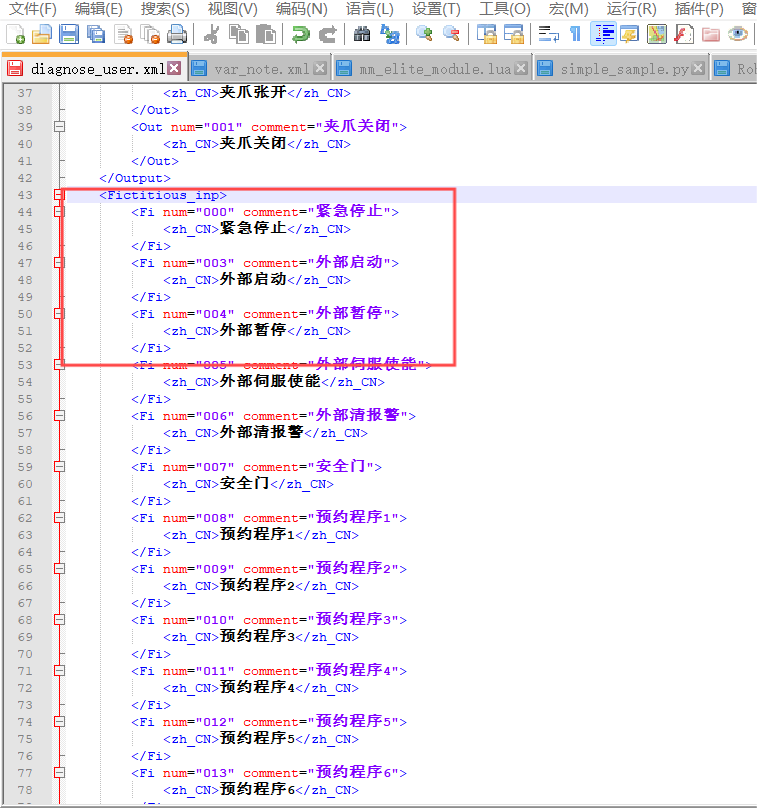
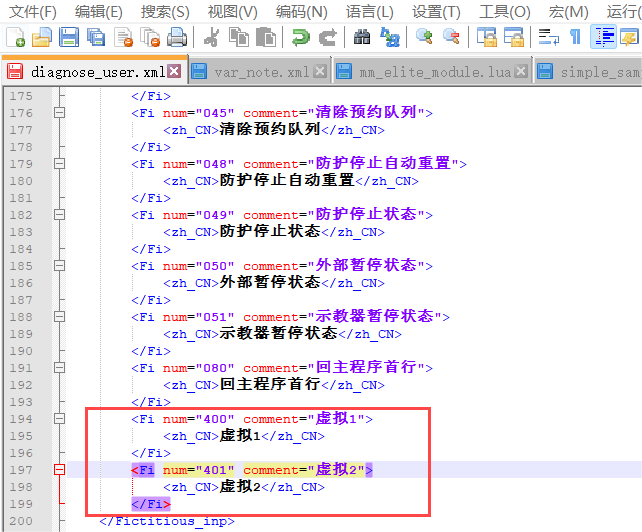
Fictitious_inp代表虚拟输入信号,400开始,代表M912虚拟输入信号注释
虚拟输入信号注释可参照下图,按照格式要求及顺序进行对应虚拟输入信号注释
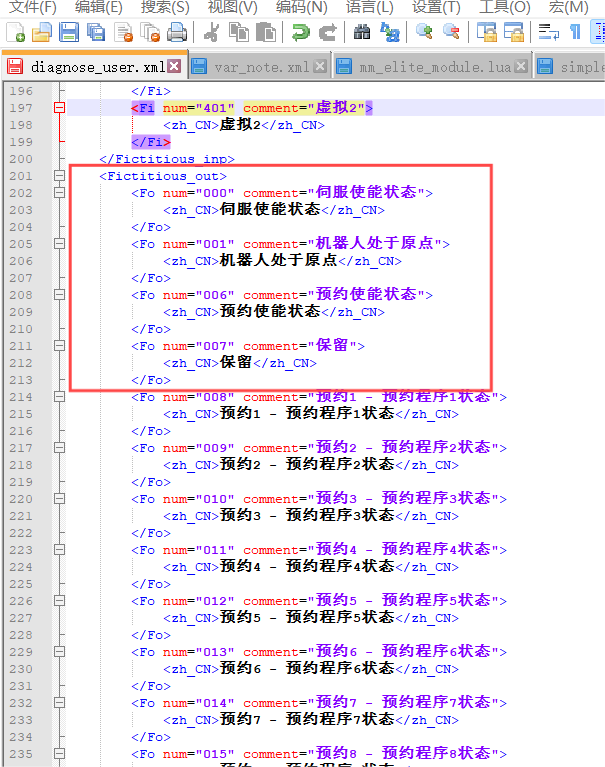
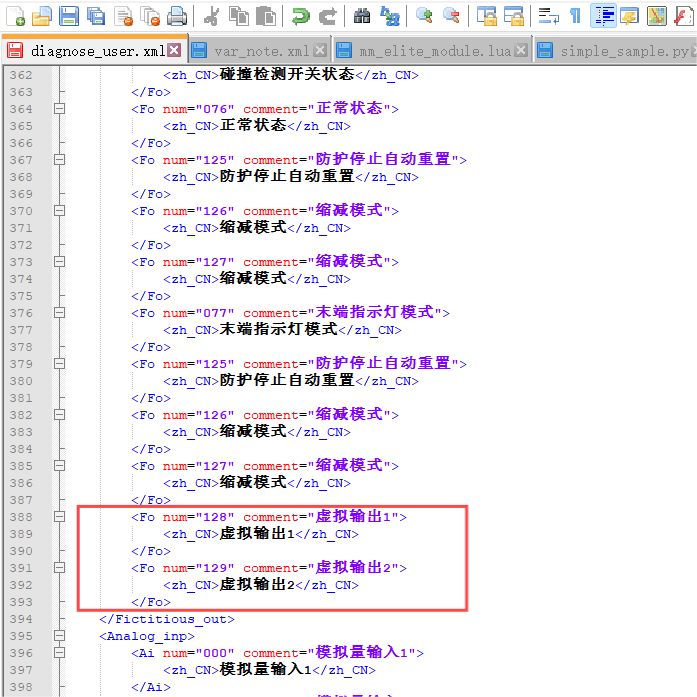
Fictitious_out代表虚拟输出信号,128开始,代表M528虚拟输出信号注释
虚拟输出信号注释可参照下图,按照格式要求及顺序进行对应虚拟输出信号注释
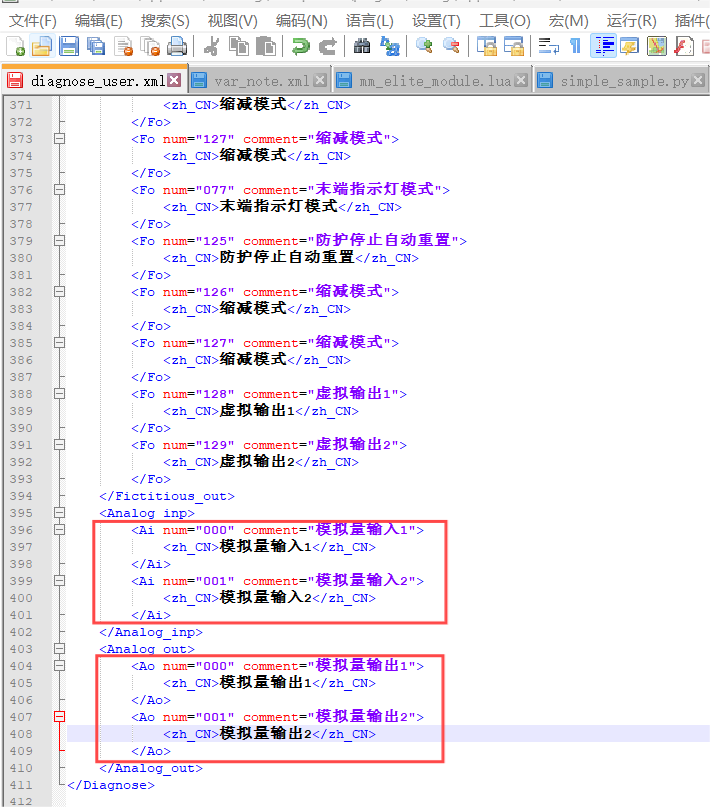
Analog_inp代表模拟量输入信号注释,000开始,代表AI001模拟量输入信号注释
Analog_out代表模拟量输出信号注释,000开始,代表AO001模拟量输出信号注释
模拟量输入输出可参考下图所示,对应顺序依次添加
7)更改完成后,将U盘插入机器人控制柜中,导航至系统-文件恢复-输入输出注释升级-全局变量注释导入,将更改后的注释导入,具体操作如下图所示

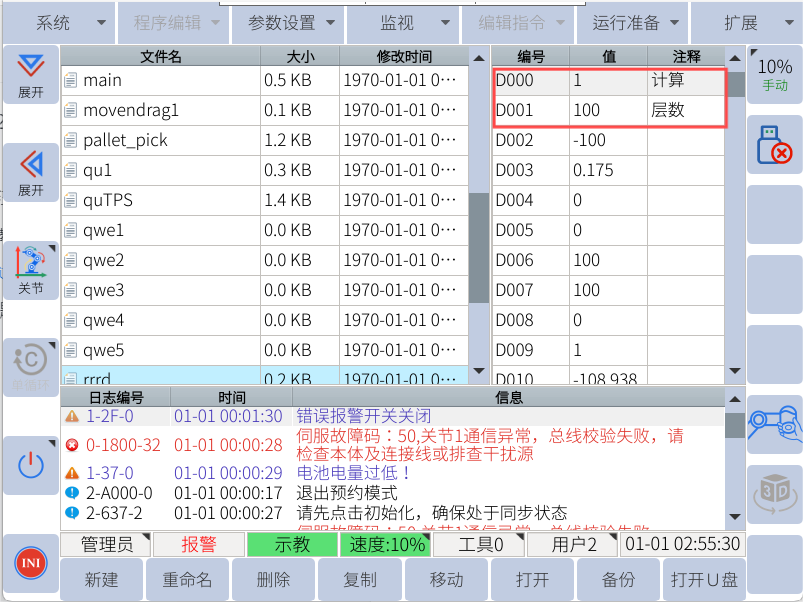
8)导入成功后,此时打开监视-全局变量-D变量(更改后的变量或者输入输出),查看更改后的注释,出现与文件相同的注释,已在对应变量注释下,如下图所示
3.常见问题解答
1.操作文件备份或者恢复时,示教器上无全局变量注释或者输入输出注释的选项
当前操作权限问题,可把当前权限改为管理员模式(导航至参数设置-用户权限-管理员-密码:333333)
2.U盘备份文件时出现全局变量注释备份失败
导航至监视-全局变量,随意打开一个任意变量,添加变量注释,再重新备份,即可成功
3.XML文件使用什么软件打开
可以使用记事本或者Notepad++
4.当无U盘时如操作,是否可以在线更改
可以在线更改,可已通过FTP直接连接到控制器中,找到rbctrl文件夹下的对应文件进行更改,可参考notepad++或者VScord在线连接文档


























