
















EC机器人常用参数配置
2024-11-06
1. 常用参数配置简介
常用参数配置包括:IP,负载,重心,安装方式,机械零点确定,当我们拿到新机时需要做以上配置,确保机器人正常使用。
2. 操作流程
1) . 机器人IP设置
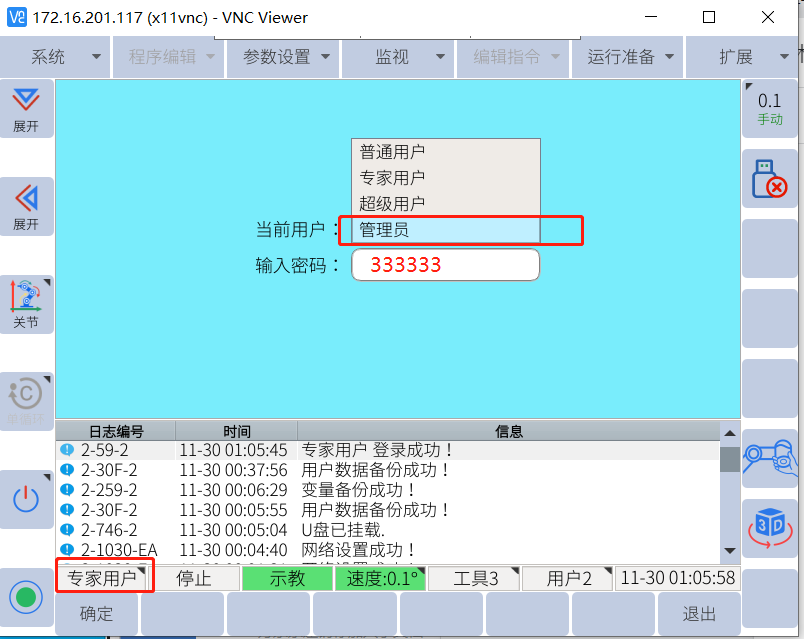
登入管理员模式
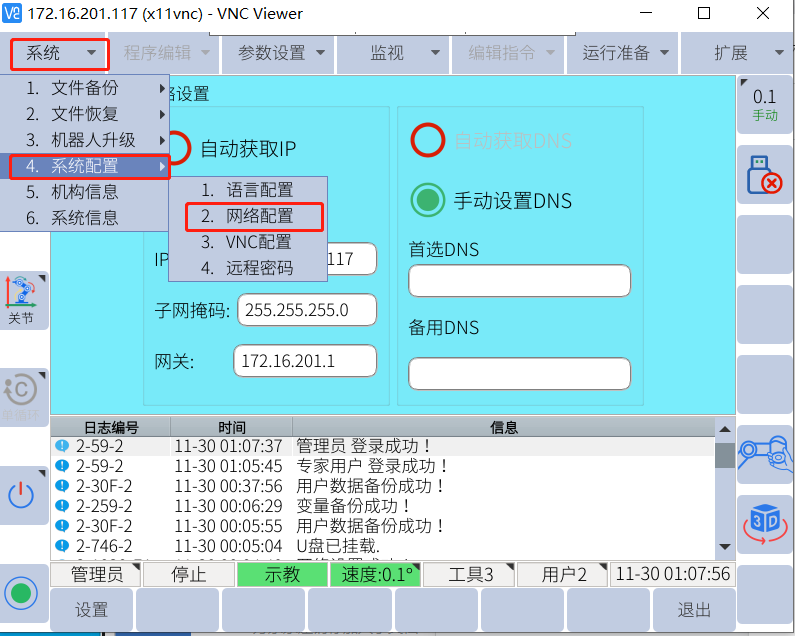
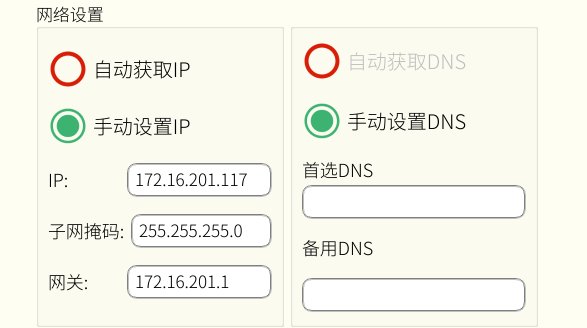
点击系统--系统配置---网络配置---输入IP 子网掩码 以及网关----输入完成后点击设置
2) 负载及重心设置
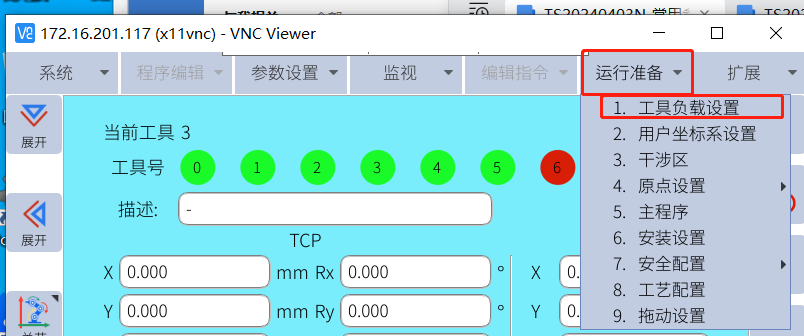
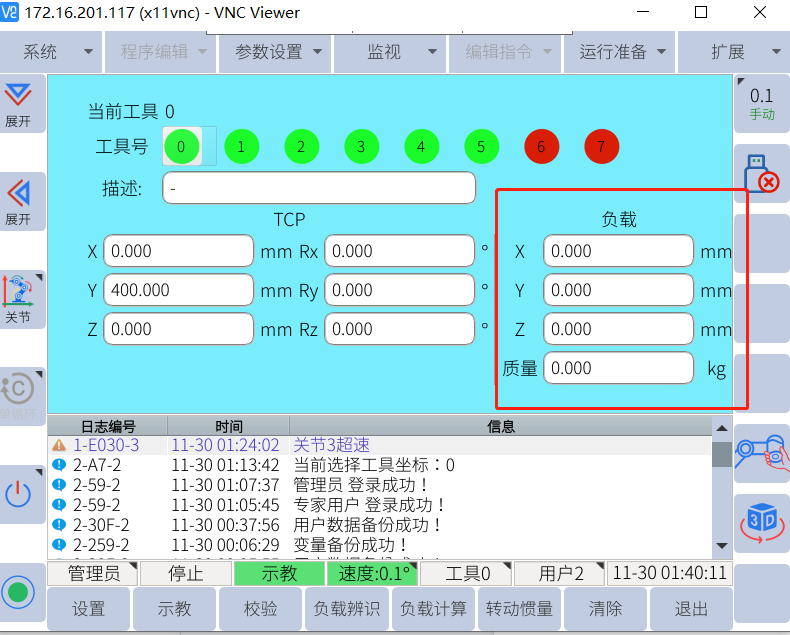
点击运行准备---工具负载设置,用户可以同时设置8个不同的工具使用(0-7)。
工具负载和重心的设置:
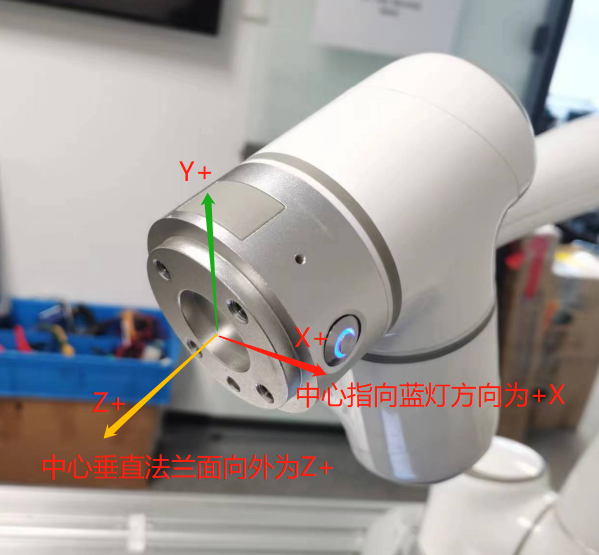
设置负载重心前首先我们先知道法兰盘中心点的位置及坐标系方向,EC系列法兰盘中心点如下图:
将实际工件+夹爪重量写入质量中(注意:当工件重量相差很大时,需要在JBI程序中使用“设置负载”指令设置两段质量,来保证机器人运行稳定。)
将质心设置到X Y Z中(注意:写入的值为相对于法兰盘中心坐标的偏差量。)
3) 安装方式
点击运行准备---安装设置---选择安装方式,如下图

安装方式有3种:
地面安装:当机器人基座平行于大地且正装时,我们需要选择地面安装。
吊挂安装:当机器人基座平行于大地且倒装时,我们需要选择吊挂安装。
倾斜安装:当机器人基座与大地不平行时,我们需要选择倾斜安装。
选择倾斜安装时会出现两个参数:偏转角度和旋转角度如下图:
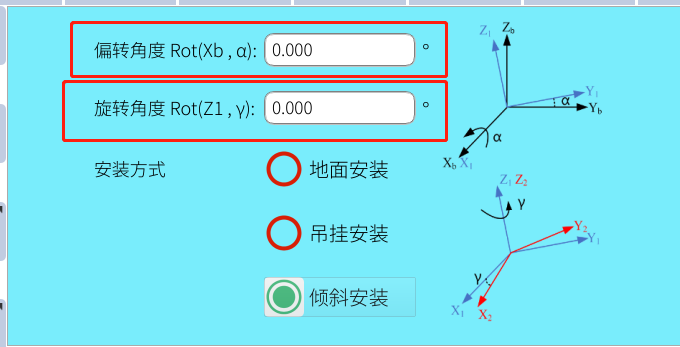
偏转角度指的是机器人基座平面与大地水平面的夹角α,如下图:

旋转角度指的是机器人线缆出线的方向向下时为0度,如果线缆方向不是向下时,那么线缆的朝向与0度时的夹角为γ(范围0-360度),夹角方向如下图所示。

4) 机械零点确认
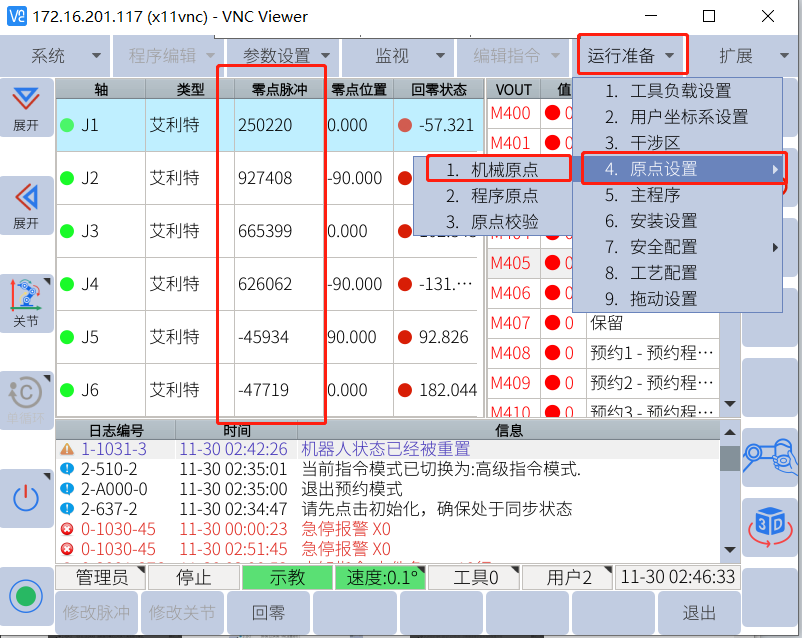
每一台机器人出厂时已做好零点校准,每台机械零点脉冲值不同且唯一
登录管理员模式------点击运行准备----原点设置----机械原点,如下图为零点脉冲值。(新机收到后需要拍照保存该界面)
机械零点姿态




























