
















EC机器人防护停止和急停信号接线
1. 防护停止和急停简介
在机器人的应用场景中,外部急停必不可少,并且所有的安@全io信号都是双通道(冗余)并且必须使用两条单独的电线。
艾利特EC/EA系列机器人配有两个永久输入:紧急停止和防护停止,紧急停止输入只能与安全等级的紧急停止设备一起使用。防护停止输入和与安全相关的保护设备一起使用。
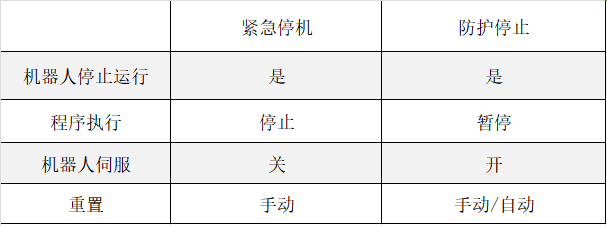
其中紧急停止和防护停止都可以使机器人停止运动,不同的是紧急停止会使机器人掉电下伺服,但防护停止不会。具体差异见下表。
2. 接线方式
2.1 系统I/O
控制箱中包含数字 I/O、模拟 I/O 和所有安全 I/O ,其中E_STOP端子排为控制外部停止相关配置,S_STOP端子排为控制防护停止相关配置,如 图 2-1 所示。
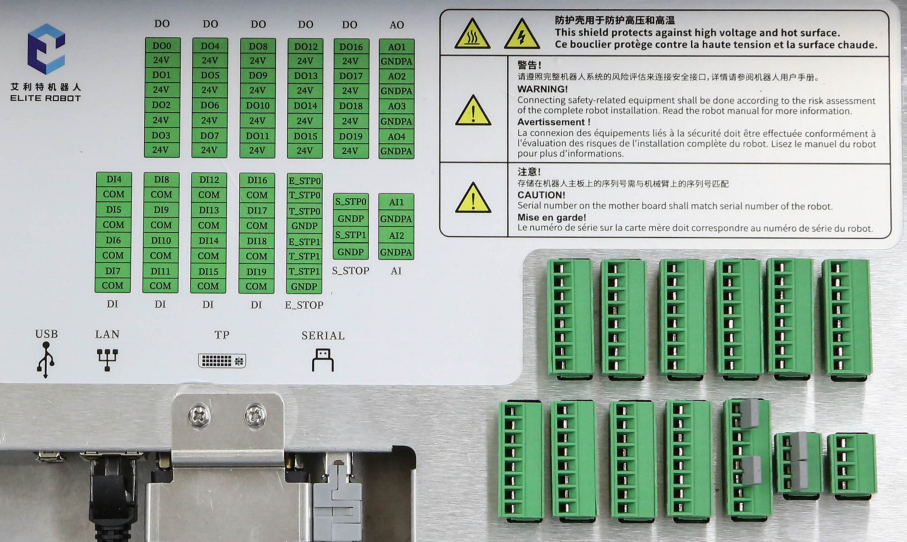
图2-1 控制柜I/O
2.2 外部急停
外部紧急停止按钮可接入E_STOP端子(见图 2-1 )。
在控制柜默认的接线方式下(默认出厂E_STP0和 T_STP0短接,E_STP1和 T_STP1短接),示教器的紧急停止按钮生效。
如需屏蔽示教器的紧急停止按钮,请参照接线方式中的“屏蔽示教器紧急停止按钮”;
如需接入外部紧急停止按钮,请参照接线方式中的“连接外部紧急停止按钮”。
具体的接线方式如下所示:
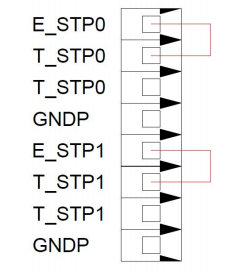
图 2-2: 默认的接线方式
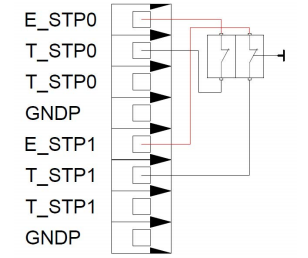
图 2-3 连接外部紧急停止按钮
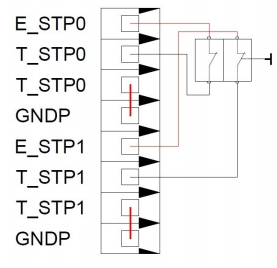
图2-4: 屏蔽示教器紧急停止按钮
用户可通过短接T_STP0到GNDP,短接T_STP1到GNDP来屏蔽示教器紧急停止按钮。
注意:示教器的紧急停止按钮无效。用户需额外提供紧急停止按钮来保证操作人员的安全。在非必要情况下,请勿屏蔽示教器的紧急停止按钮。
2.3 防护停止
防护停止将暂时暂停程序。默认情况下,用户必须按下示教器上的绿色播放按钮才能恢复程序执行。防护停止可以通过用户plc进行关联自动恢复S19信号,配置为在信号为高电平时自动恢复。
出厂状态下:S_STP0 与 GNDP 短接,S_STP1 与 GNDP 短接
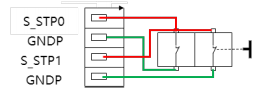
图 2-5 : 双通道防护停止的设置
启动防护停止后自动恢复的 PLC 程序示例:
当X004 置 1 时,后触发防护停止暂停,当防护停止信号重新连接后,任务能自动恢复运行。

图 2-6 : 启动停止后自动恢复的 PLC 示例


























