
















EC机器人缩减模式干涉区及软极限
1. 本篇文档介绍了EC机器人缩减模式配置使用,干涉区配置及软极限的应用
2. 操作流程
2.1缩减模式配置
出于安全原因,机器人的某些功能可能会受到限制。要配置这些设置航到 运行准备 >安全配置 > 安全限制。
安全限制可配置功率,动量,工具力,肘部力以及速度百分比的缩减。当机器人触发缩减模式时,机器人会以缩减后的速度、功率工作。
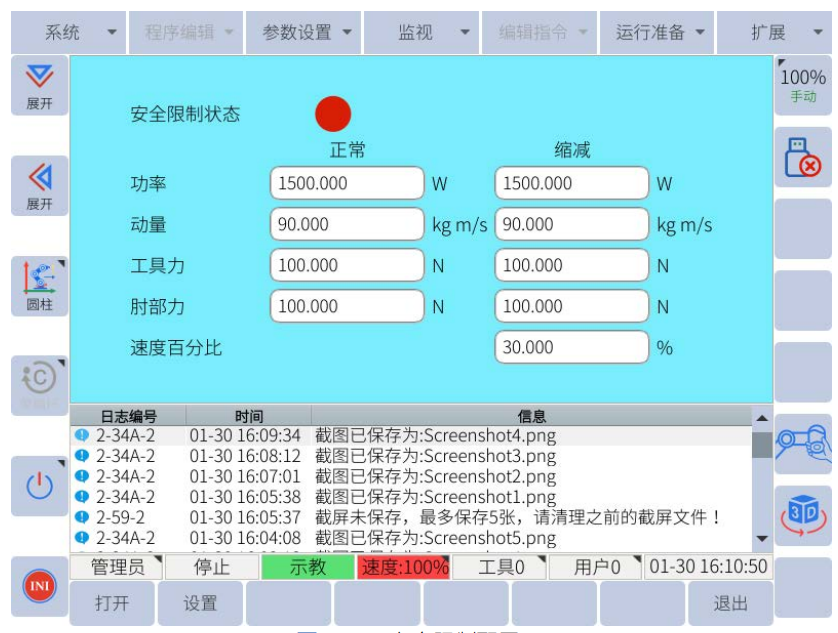
功率:限制机器人对环境做的最大机械功。
动量:限制最大机器人动量。
工具力:限制机器人工具在夹紧情况中施加的最大力。
肘部力: 限制机器人肘部对环境施加的最大力。
速度百分比:限制正常模式下的速度
要启用这些安全限制,请单击子菜单区域中的“打开/关闭”。
2.2缩减模式触发
用户可在 监视 > 输入输出 > 虚拟输出 界面查看 M526 和 M527 是否为缩减模式。
用户通过在 扩展>用户PLC 界面配置辅助寄存器S17、S18触发条件。
常用数字信号和机器人M变量进行缩减模式触发
两路赋值寄存器S17、S18,触发一个信号即可进入缩减模式;也可作为双回路使用。
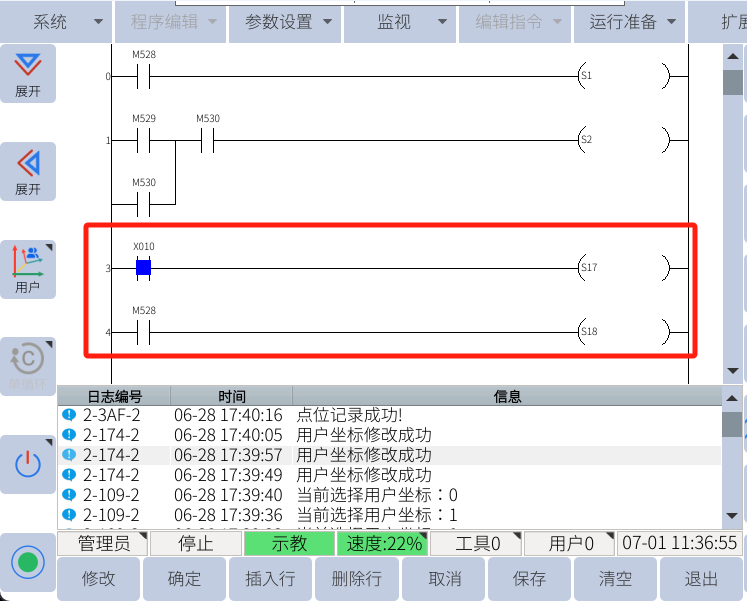
注:用户PLC修改完成后要先保存,机器人重启生效。
2.3干涉区的设置及应用
干涉区是与基座坐标系轴平行的立方体。系统信号对机器人进行判断是在干涉区内还是干涉区外,并把判断情况以信号方式输出M440-M455。干涉区的设定方法有以下三种:
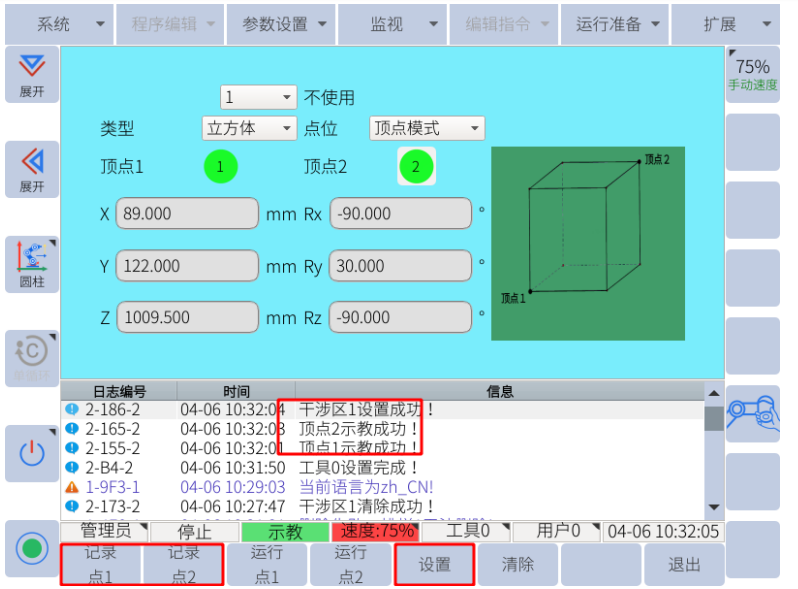
顶点模式
1. 选择“运行准备 > 干涉区”。
2. 设置“使用方式”为“立方体”,“点位”为“顶点模式”。
3. 选择“顶点 1”,用轴操作键移动机器人到立方体的顶点 1,点击“记录点 1”。
4. 选择“顶点 2”,用轴操作键移动机器人到立方体的顶点 2,点击“记录点 2”。
5. 点击子菜单栏的“设置”,干涉区即设置成功。
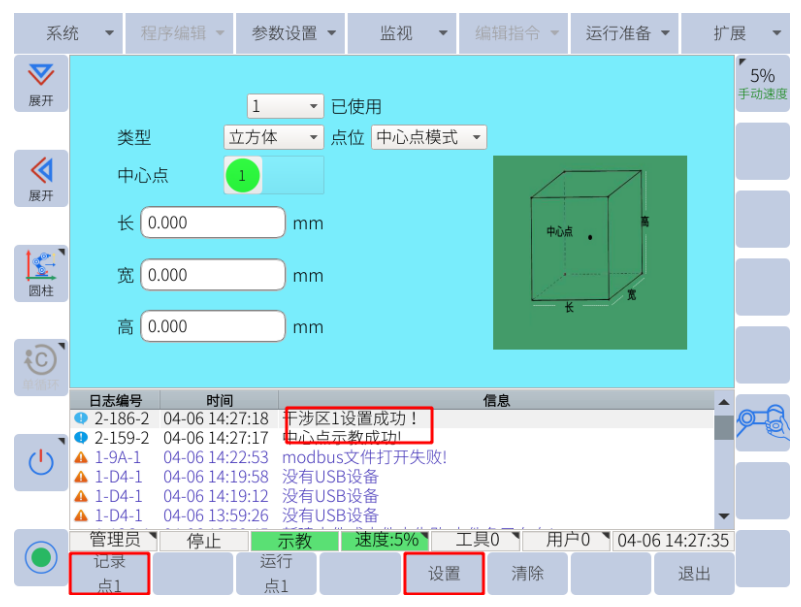
中心点模式:
1. 选择“运行准备 > 干涉区”。
2. 设置“使用方式”为“立方体”,“点位”为“中心点”。
3. 选择“中心点”,用轴操作键移动机器人到立方体的中心点位置,点击“记录点 1”。
4. 输入立方体的长、宽、高数值,单位mm。
5. 点击子菜单栏的“设置”,干涉区即设置成功。
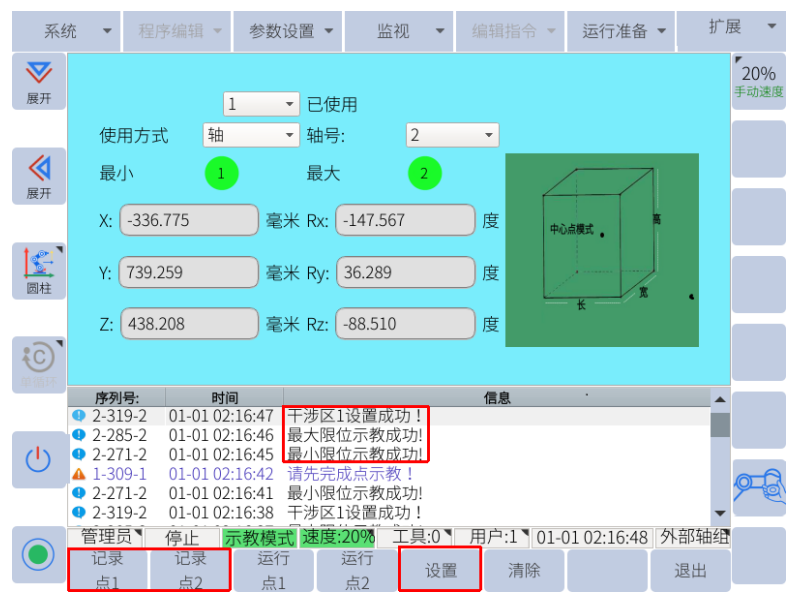
轴干涉区:指判断各轴当前位置并输出信号
1. 选择“运行准备 > 干涉区”。
2. 设置“使用方式”为“关节”,选择对应的轴号。
3. 选择“最小点”,按相应的轴操作键记录该轴区间的最小点位,点击“记录点 1”。
4. 选择“最大点”,按相应的轴操作键记录该轴区间的最大点位,点击“记录点 2”。
5. 点击子菜单栏的“设置”,干涉区即设置成功。
干涉区触发信号为虚拟输出M440-M455(干涉区1到16)
2.4软极限设置
软极限可以限制每个关节的旋转极限。导航 参数设置 -> 软极限设置 除了3轴极限为正负160°其他轴极限均为正负360°。

3. 常见问题
如果开机发现某个轴在软极限之外,并触发软极限报警;可通过示教器操作该轴往回转动。


























