EC机器人用户PLC版一键启动
2024-11-06
1 简述
一键启动功能可以通过用户 PLC 关联相应的系统变量来实现控制机器人的复位,上伺服,精确模式标定,跳主程序,启动运行等,相对于通过操作示教器启动机器人运行更便捷。
2 功能实现所需变量
2.1 触发信号
触发信号可以是外接按扭触发,(DI)输入信号。
也可以外部PLC信号触发。
2.2 虚拟反馈变量
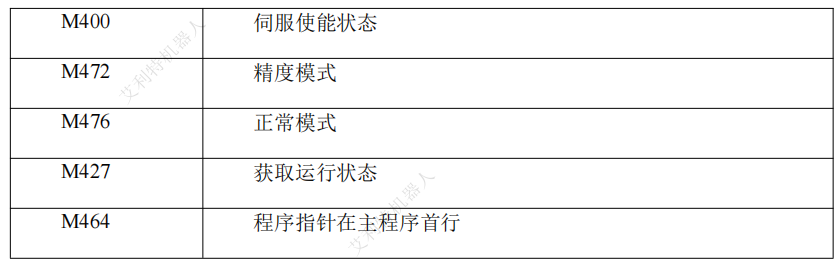
以下变量在用户手册附件里面查录相关作用
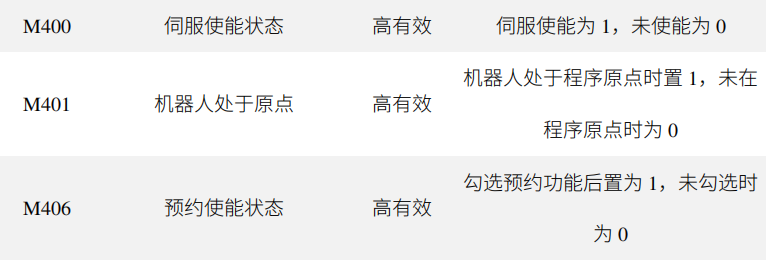
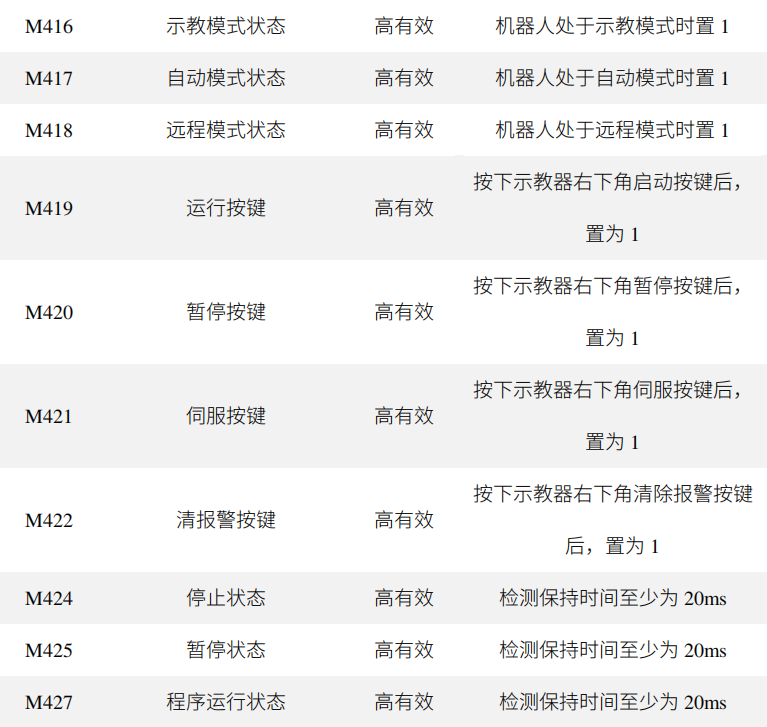
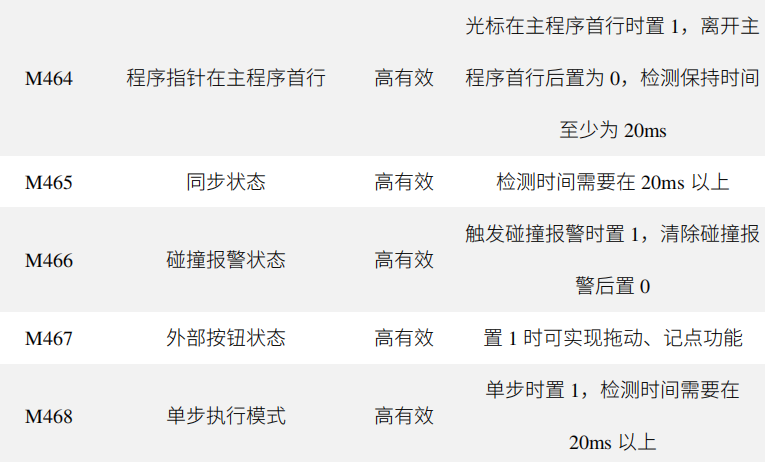
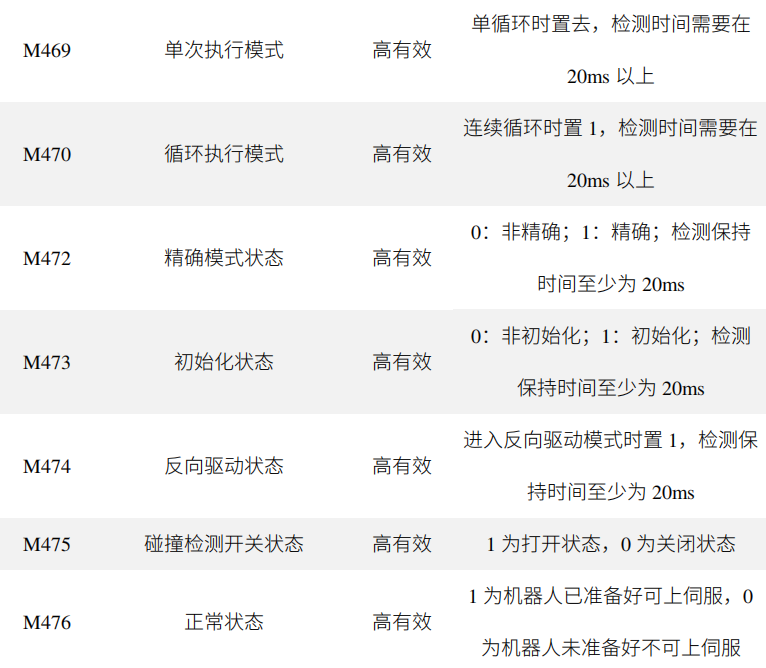
虚拟变量(M变量)
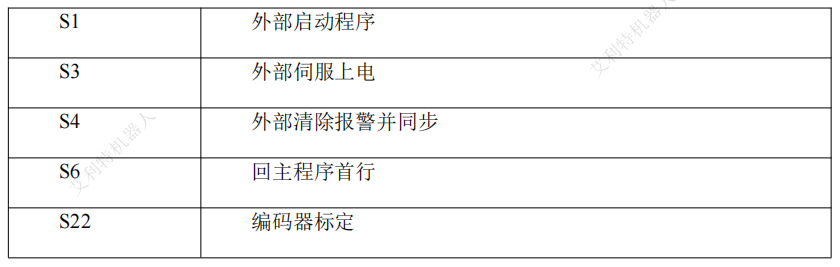
以下信号在用户PLC里面查录相关功能:
PLC信号映射(S变量)
3 操作步骤
3.1 设置主程序
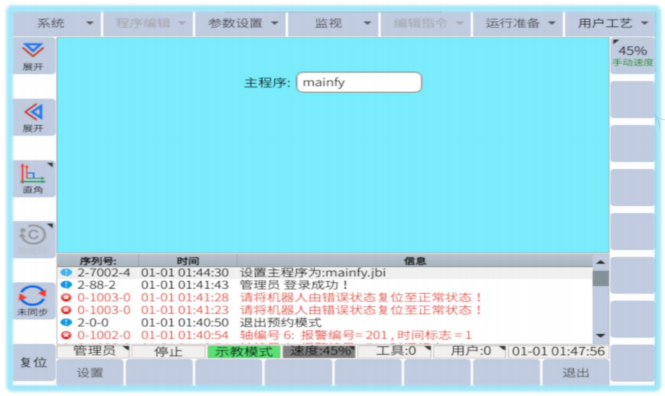
将 mianfy.jbi 设置为主程序。设置路径 运行准备→主程序,如下图所示:
主程序选择

选择 mianfy 后点击屏幕左下角的设置按钮,设置完成后信息框提示“设置主程序
为:mainfy.jbi”
3.2 写入用户PLC
用户PLC是一个始终在后台运行的PLC程序,PLC 使用梯形逻辑,这是一种可视化编程语言。每行称为一个梯级,按照梯形图从上至下、从左至右的顺序执行。一旦梯形图的所有梯级都执行完毕,PLC 程序将返回顶部梯级并再次执行程序。PLC 最多支持200 行或梯级。
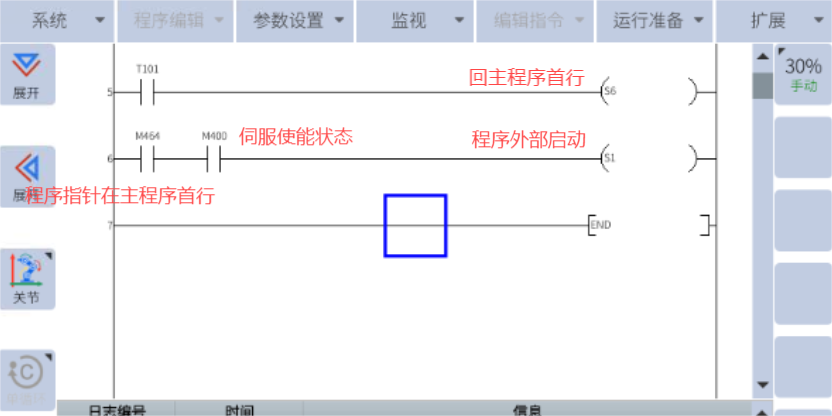
要访问用户 PLC,请导航到“ 用户工艺 -> 用户 PLC”。
如下图为一键启动的 PLC 程序。写入如下PLC程序,X004为外部启动信号,写入后保存重启。

机械臂重启后,将钥匙旋转置远程模式或者自动模式。
触发输入信号(X004),机械臂即可完成清除报警,抱闸,上使能,标定进入精确模式,运行主程序操作,再次触发X004可暂停,如果机械臂报警,触发(X004)也可清除报警,回主程序首行运行。
注:以上“X004”是机械臂开机后一键启动的触发信号,这个信号可以更改为虚拟信号触发,也可以外部PLC触发。
附录