
















艾利特 Centaur-G1 轮式人形机器人:一脑多形,元启万物
2026-05-25
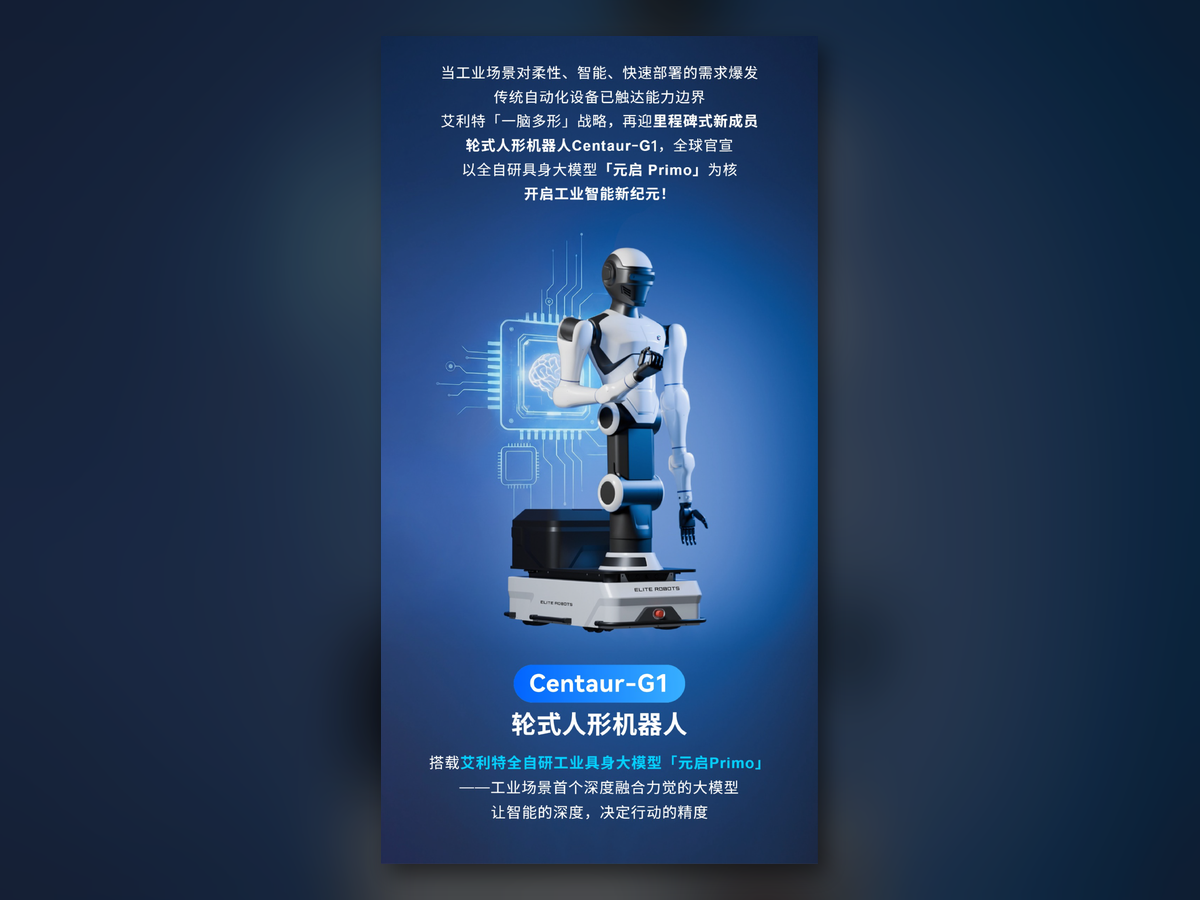
当工业场景对柔性、智能和快速部署的需求持续提升,传统自动化设备正在触达能力边界。机器人不再只是完成单一动作的执行设备,而是需要理解环境、规划任务、协同操作,并在不同场景中完成稳定行动。
在这一趋势下,艾利特机器人推出轮式人形机器人 Centaur-G1。作为艾利特“一脑多形”战略下的人形机器人产品,Centaur-G1 搭载艾利特自研工业具身大模型元启 Primo,以轮式移动底盘、人形双臂、多模态感知、力控交互和空间智能能力,探索具身智能在真实场景中的落地路径。
元启 Primo:让机器人从自动化设备进化为具身智能伙伴
Centaur-G1 搭载的元启 Primo,是艾利特面向轮式人形机器人的具身大模型能力。它不是独立产品,而是 Centaur-G1 的智能引擎,支撑机器人完成感知、理解、规划和动作决策。
元启 Primo 原生融合多模态感知、世界模型、强化学习与端到端决策能力,覆盖感知层、决策规划层和空间理解层。它让机器人不只是“按程序执行”,而是能够在动态、复杂、非结构化环境中,围绕任务目标完成更接近真实操作需求的判断与行动。
多模态全域感知:让机器人理解真实物理世界
真实环境并不总是标准、稳定、可预测的。反光零件、动态光照、密集堆叠、人员移动和设备遮挡,都会影响机器人对场景的理解。
Centaur-G1 通过激光雷达、头部 RGB-D 相机、腕部双目微距相机和末端六维力传感器,构建多模态感知体系。视觉、深度与力觉实时交汇,让机器人能够同时理解空间位置、物体状态和接触反馈。
这套感知体系,让 Centaur-G1 在工业巡检、精细操作、双手装配、柔性搬运等任务中,具备更完整的现场理解能力。机器人不只“看见”环境,还能通过力觉反馈理解接触过程,从而减少操作盲区和动作过冲。
手眼力协同:让智能深度决定行动精度
在具身智能场景中,机器人能否稳定完成任务,关键不只在于“看得见”,还在于“做得准”。Centaur-G1 将高精度力控反馈融入具身智能操作能力,通过手、眼、力协同,让机器人在精密插接、双手装配、柔性搬运等任务中具备更高的动作一致性。
根据产品发布信息,Centaur-G1 具备 250Hz 高频力觉推理能力,位置控制精度可达 ±0.1mm,力控精度可达 0.75N / 0.05Nm。对于需要精细交互的任务,这些能力有助于机器人在操作过程中结合视觉与力觉反馈进行动态调整。
空间智能:面向长时序任务和复杂环境
人形机器人进入真实场景,不只要完成单次动作,还要理解任务步骤、空间位置和环境变化。Centaur-G1 具备自主探索、语义建图、自然语言指令解析和长时序任务逻辑拆解能力。
例如,当任务不再是简单的“移动到某点”,而是“去实验台拿起移液枪,走到左侧工作台进行加样”,机器人需要理解目标物、任务顺序、空间路径和操作动作之间的关系。Centaur-G1 正是围绕这类复杂任务构建能力闭环。
轮式双臂:为工业而生,为效率而行
与双足人形机器人相比,轮式构型在工业地面、实验室、机房、商业空间等平整场景中更强调稳定性、效率和工程部署。Centaur-G1 采用全向移动底盘,具备精细化建图、±0.01m 高节拍导航和 360° 全向自由移动能力,可在狭窄通道中灵活穿行,自主规划路径。
这种轮式移动能力,使 Centaur-G1 不再局限于单一工位,而是可以围绕多个任务点执行跨区域任务,适合工业巡检、物料转运、设备辅助操作和多场景服务探索。
高精度双臂协作:双手装配,精密插接,柔性搬运
Centaur-G1 采用 7 自由度冗余机械臂,单臂负载 5kg,双臂协同负载 10kg,重复定位精度 ±0.1mm。配合自研双臂协同规划算法,机器人能够面向双手装配、精密插接、柔性搬运等任务进行协同操作。
对于智能制造、科研教育、实验室自动化和服务场景而言,双臂协作的意义不只是“多一只手”,而是让机器人具备更接近人类的操作方式,可以处理需要扶持、对位、递送、插接和组合动作的任务。
多模态感知融合:认知无盲区,操作无过冲
Centaur-G1 通过头部 RGB-D 全局定位、腕部双目微距显微操作和末端六维力柔顺控制,将环境理解、近距离观察和接触反馈结合起来。
这让机器人能够在宏观场景和微观操作之间切换:既能理解自己处在什么环境中,也能判断手边物体的位置、姿态和接触状态。对于真实任务而言,这种融合能力是机器人走向“可理解、可协作、可进化”的关键基础。
核心能力速览

Centaur-G1 的核心能力包括:
单臂负载:5kg重复定位精度:±0.1mm全身自由度:20 个电池容量:48V 40Ah移动底盘定位精度:±10mm单臂自由度:7 个操作高度:1500mm
以上参数建议官网发布时直接与 21.png 保持一致,不额外扩展未经确认的参数项。
艾利特轮式人形机器人典型应用场景:从工业制造走向公共服务

同一颗智能大脑,驱动不同形态的身体;相同的能力体系,适配万千场景的需求。Centaur-G1 面向 AI Infra、智能制造、科研教育、医疗健康、家庭服务和商业服务等典型方向,探索人形机器人在多场景中的应用边界。
在 AI Infra 场景中,Centaur-G1 可面向机房、服务器、光模块等高价值产业链任务进行能力延展;在智能制造中,可探索跨工位协作、柔性操作和精密辅助;在科研教育中,可作为具身智能研究、实验教学和应用验证平台;在医疗健康、商业服务和家庭服务方向,则可围绕辅助服务、环境感知和人机交互进一步拓展。
需要强调的是,人形机器人并不意味着替代所有自动化方案。对于固定工位上下料、码垛、焊接、力控装配等明确场景,协作机器人、码垛一体机、焊接工作站仍然是更直接的工程选择。Centaur-G1 更适合出现在需要移动操作、双臂协作、环境理解和跨场景任务的判断链路中。
以一脑多形,开启工业智能新纪元
从协作机器人到复合机器人,再到轮式人形机器人,艾利特机器人正在沿着“一脑多形”的战略路径持续推进:用统一的智能能力,驱动不同机器人形态,服务从工业制造到公共服务的多元场景。
Centaur-G1 的发布,不只是一次产品形态的更新,更是艾利特对具身智能时代“智能操作机器人”的系统性回答:机器人要拥有更聪明的大脑,也要拥有更适合任务的身体;既能理解复杂环境,也能完成可靠操作。
未来,艾利特将继续围绕具身智能、智能操作和多形态机器人矩阵进行技术迭代,让机器人从单点自动化设备,走向可理解、可协作、可进化的智能伙伴。
您可能感兴趣
-
柔性智造时代,艾利特协作机器人挑战汽车行业无限可能!

2026/05/15
-
业内首家!艾利特机器人通过MTBF 10万小时认证,协作机器人可靠性攀顶新台阶!
艾利特机器人的产品可靠性之路再攀高峰,顺利通过上海机器人研发与转化功能型平台(以下简称上电科)“MTBF 100000小时测评”认证,完成协作机器人业界最高等级的可靠性测试,实现协作机器人平均无故障运行时间(MTBF)重大突破!
2023/12/20
-
背靠苏州光通信最强腹地,艾利特登榜《2026胡润全球独角兽榜》
胡润研究院发布《2026全球独角兽榜》,艾利特机器人赫然在列。这份榜单背后,不仅是一家企业的跃迁,更是一座城市、一条产业链与一种时代浪潮的深度共振。
2026/07/08














