CS三位开关示教器使用
1.简介
艾利特机器人标准示教器型号为ERP400,对于安规比较严格的场合来说是需要按下伺服按钮才可以驱动机器人移动,对此场景可以选配ERP400S示教器来满足使用,以下为ERP400S使用示例。
2.操作流程
2.1 配置要求
示教器使用要求如下所示:
● 适配 CS 系列机器人;
● 适配软件版本为 CS_V2.11.0 及以上;
● 需在“配置 > 安全 > 硬件”下启用“三位开关示教器”;
● 示教器仅在“手动模式”下生效。
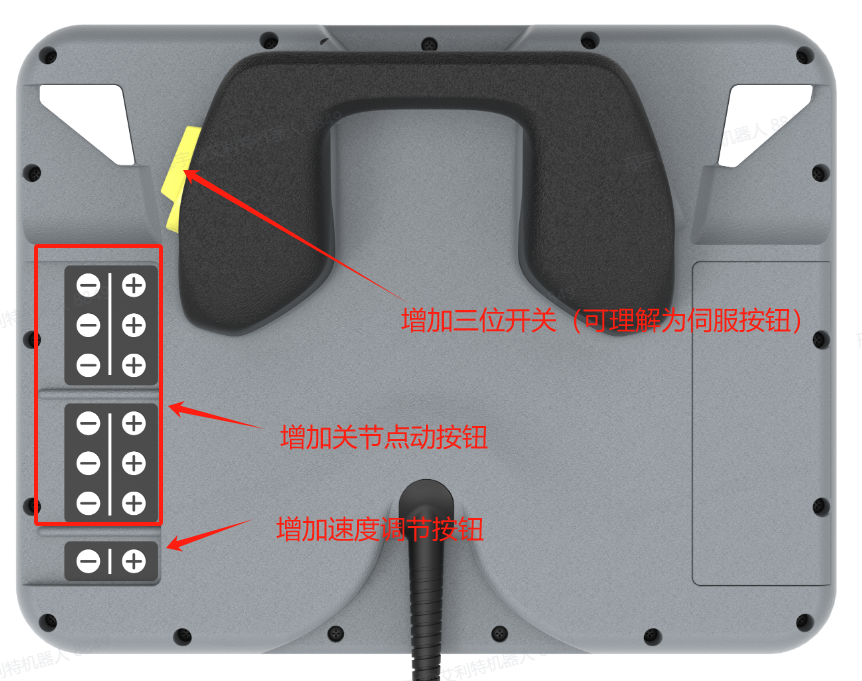
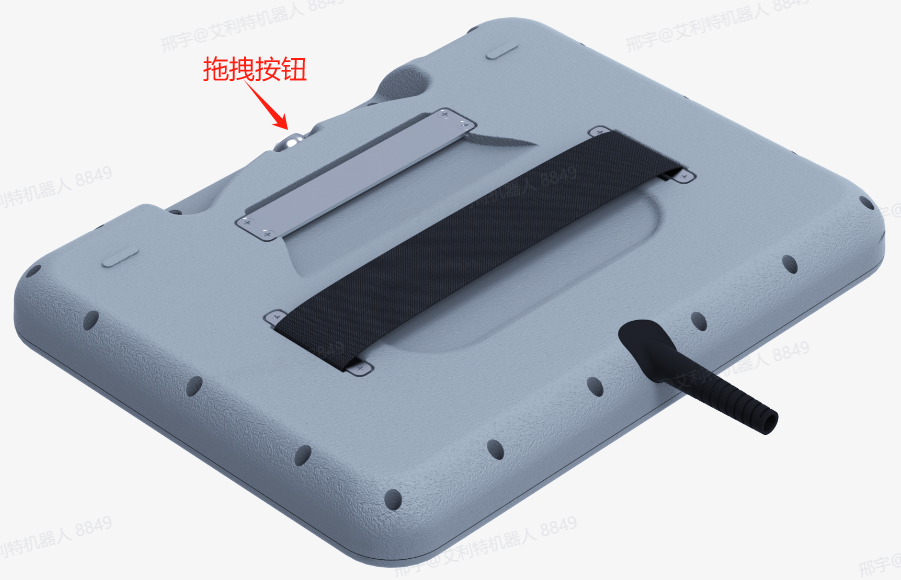
2.2 外观及硬件按钮说明
2.3 安装
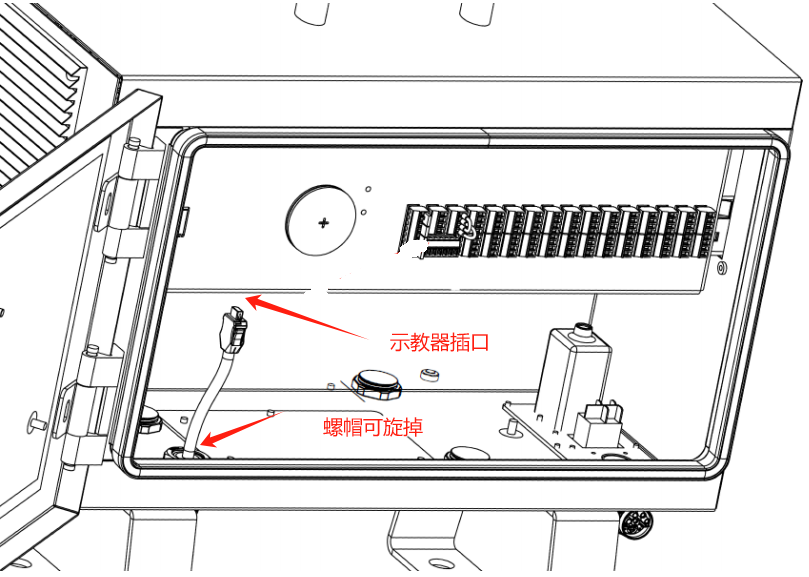
取出示教器,取下示教器线缆上的格兰头螺帽,将线缆穿过控制柜后盖连接至控制柜,如线缆连接好后拧紧螺帽紧固线缆即可。
注:连接示教器和控制柜之前,请确保控制柜电源已断开,以防发生触电事故。
2.4 使用
配置三位开关示教器
配置三位开关示教器详细步骤如下所示:
● 点击“配置 > 安全 > 硬件”,点击“安全密码”输入密码解锁该界面。点击示教器类型
下拉框选择“三位开关示教器”;
注:若未设置安全密码可在机器人“设置>安全密码",设置即可。

● 点击“应用”设置当前示教器为“三位开关示教器”;
● 设置模式为手动模式;

● 点击左上角“关闭电源”进入以下界面;

● 点击“打开电源”;

● 轻按下示教器背面三位开关解除防护停止,点击“释放抱闸”,机器人显示“正常模式”后方可操作机器人。
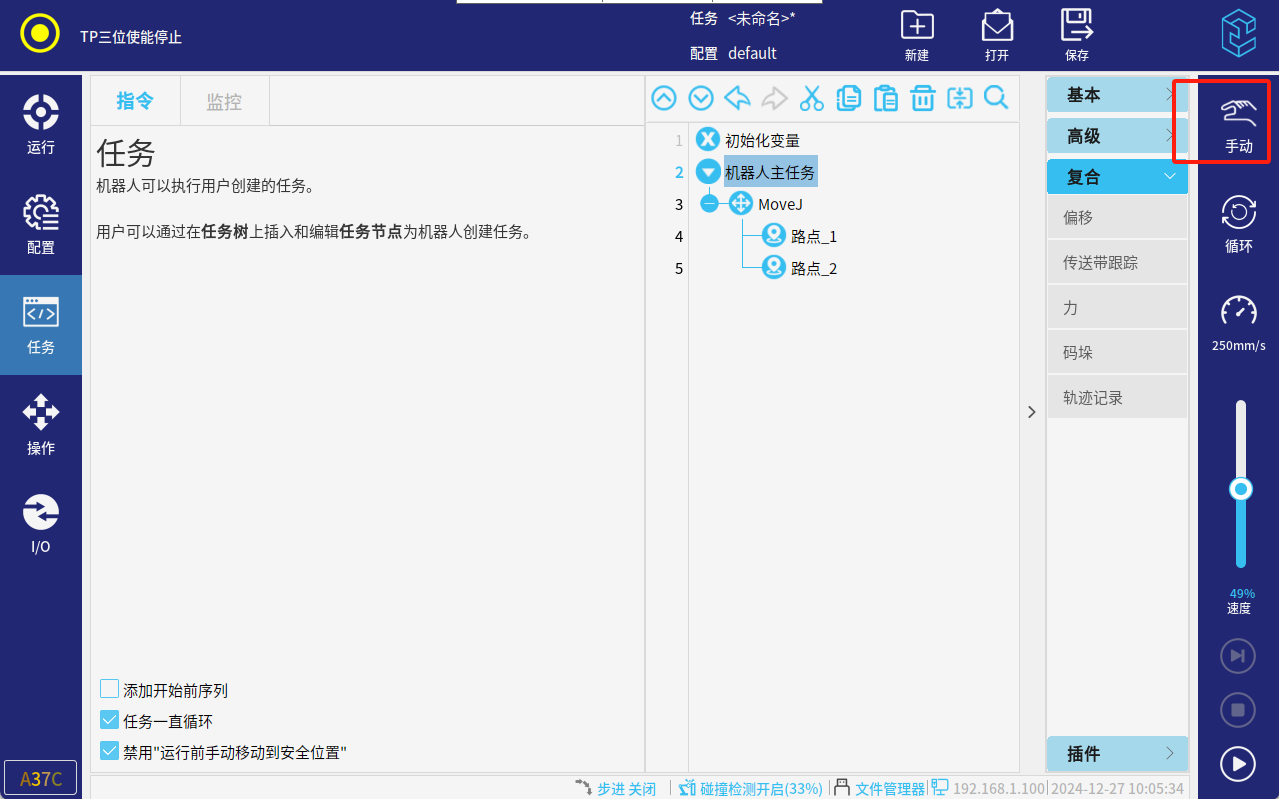
● 在手动模式下,程序编辑中只要没有按住示教器背后的三位开关机器人就会处于TP三位使能停止状态,此状态下机器人无法移动,运动类的程序无法插入,故编写程序时可视情况按下三位使能开关。
● 程序编辑完成后可切换至自动模式运行程序,自动模式下无需按下三位开关可正常运行程序。

3. 与标准示教器的差异和区别
● 外观及硬件方面:
ERP400S(三位使能示教器)
ERP400(标准示教器)
● 关于使用方面:
在手动操作移动机器人时:
三位开关示教器:要先按住三位开关后方可操作机器人。
标准示教器:可直接操作机器人。
● 关于启动手动拖拽方面:
三位开关示教器:机器人上电且释放抱闸后,连续按下两次示教器背面的三位开关 可启用手动拖动功能。
标准示教器:机器人上电且释放抱闸后,直接按下拖拽按钮。
● 关于启动反向驱动方面:
三位开关示教器:机器人上电且释放抱闸前,连续按下两次示教器背面的三位开关 可启用反向驱动功能。
标准示教器:机器人上电且释放抱闸前,直接按下拖拽按钮可启用反向驱动。
4. 其他功能
● 手动高速配置:
启用手动模式时,实时调整程序运行时的限速,需先启用“允许手动高速”,然后在右侧控制栏中调整实时速度。点击“配置 > 安全 > 三位开关”进入以下界面

● 手动高速使用:
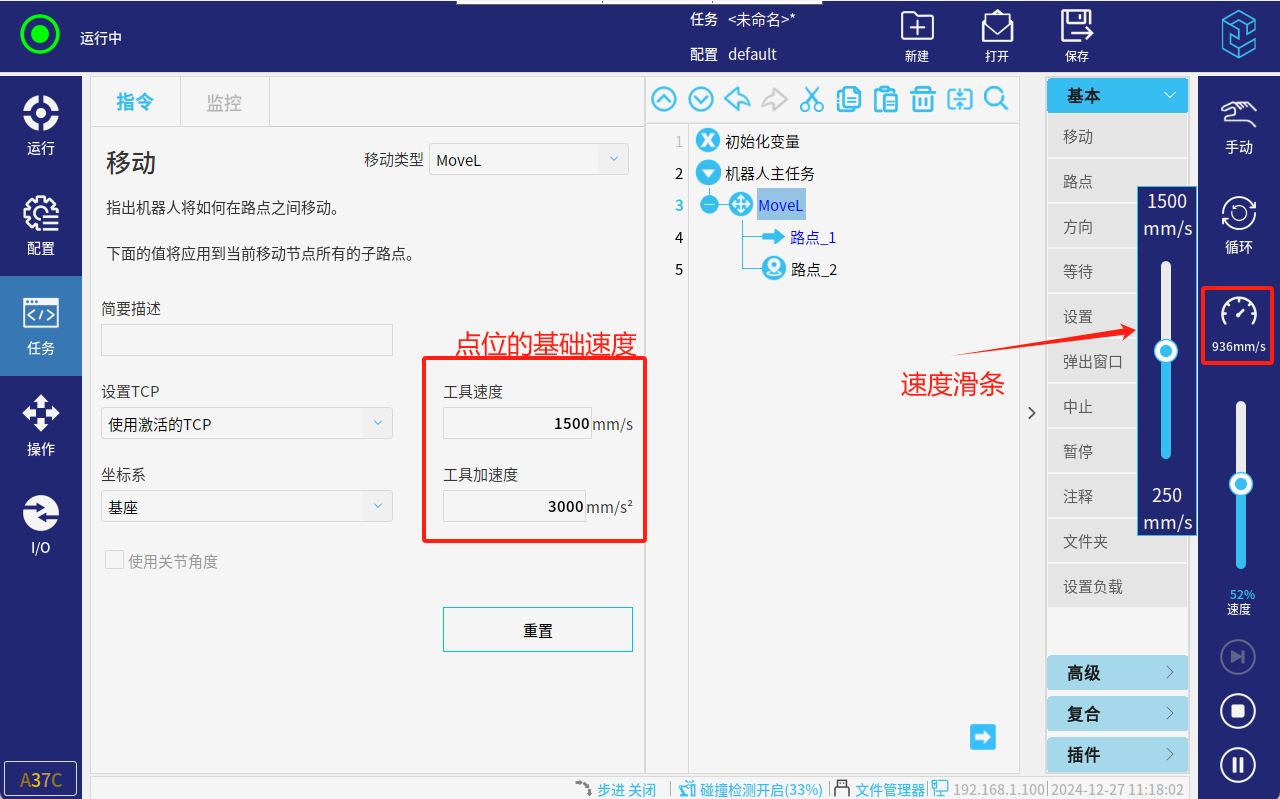
手动高速是指手动模式下任务运行时的高速状态,因为这不是一个常态化的功能,只是对于临时调试开放一下速度,所以速度条的调节不可以保持(松手后速度滑条自动恢复至默认速度250mm),需要在手动模式下任务运行后,手动调节速度滑条的位置并保持住,此时机器人会根据速度滑条的位置实时调整速度。
注:速度滑条的速度范围是250-1500mm,但在实时调节的过程中最大也不会超过点位的基础速度(点位速度如果低于250mm,调节速度滑条是没有效果的)。