EC机器人抖动问题处理
1. 简介
本文将介绍如何排查机器人抖动问题及处理。
2. 操作流程
2.1 机器人螺丝松动

2.2 设置负载数据不正确
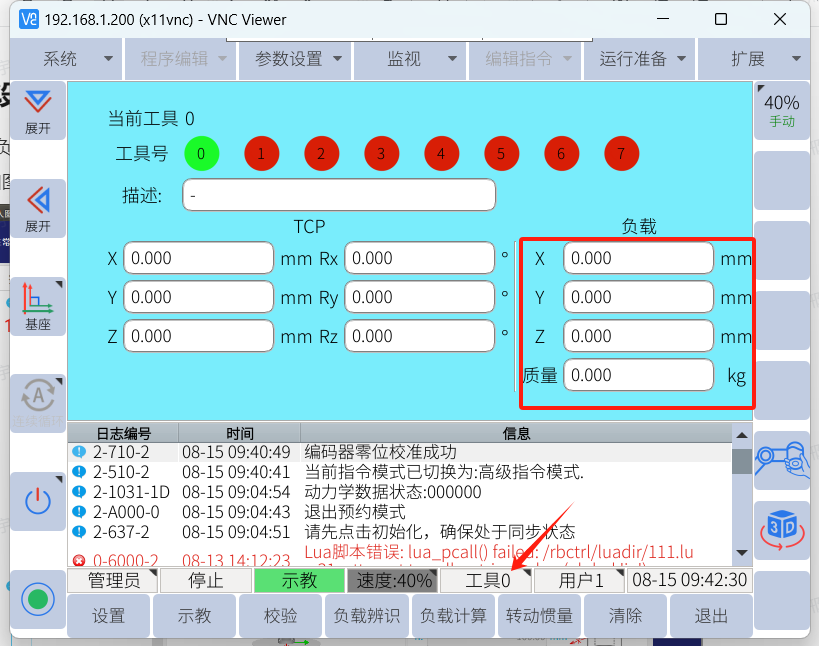
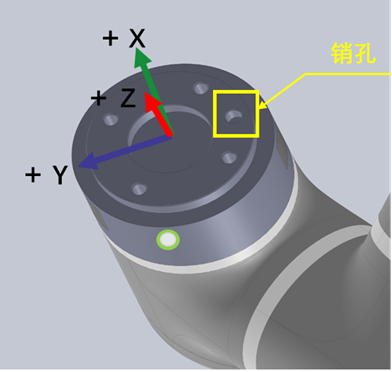
对于重心设置默认在法兰盘中心位置,可查看销孔位置以辨别出末端工装的重心是朝向那个方向,从而设置对应的参数。
2.3 速度设定不合理
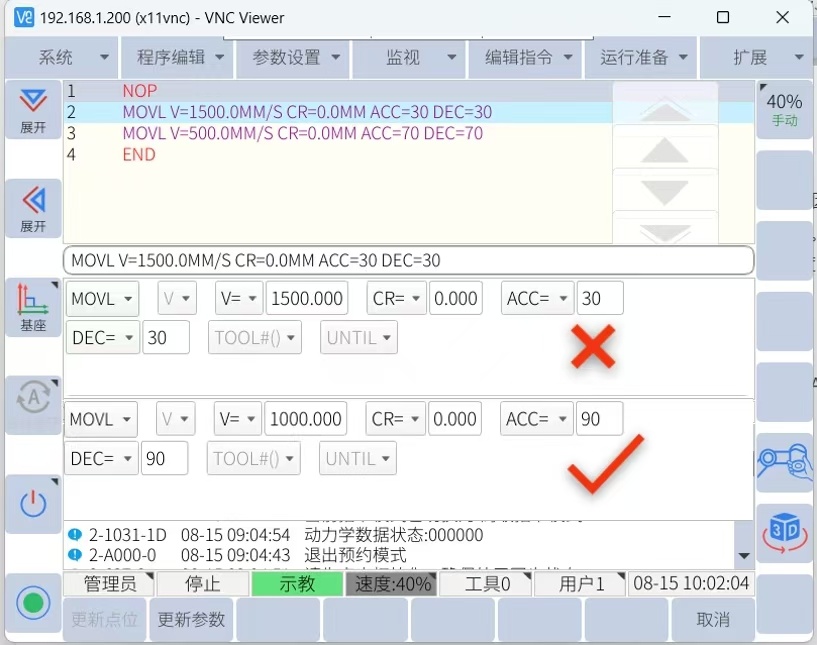
速度设置不合理会造成机械手运动不流畅,或加速度变化过大引起机器人震动,因此,在机器人速度设置中要合理,直线速度建议加速度ACC最大95 ,速度最大1500mm/s 。 建议最大关节速度VJ 95,关节加速度ACC最大95(应当根据两点距离来调整速度与加速度,才能达到最优速度)如下图所示:
如果第一次接触艾利特机器人,对速度没有完全理解可以参考以下推荐速度参数。
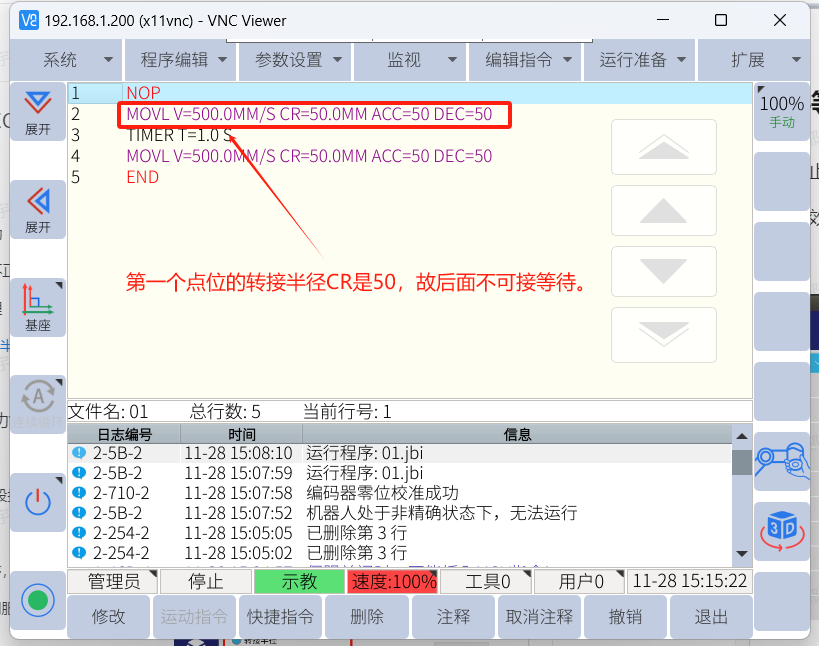
2.4 CR(转接半径)不为0 ,且后面有时间等待或者条件等待
当CR不为0 ,且后面有延时或者条件等待时,机器人会转弯时快速停止 ,就可能造成抖动或者出现其他报警 ,长期这样也会对减速器损伤。如图所示:
2.5 本体碰撞硬件损坏
按住示教器背面的自由驱动按钮或点击操作选项卡的“拖动”,手动拖动每个轴检查是否有卡顿,无卡顿建议从2.1-2.4步骤进行排查,有卡顿大概率为碰撞导致谐波减速机,交叉滚子轴承损坏,需联系艾利特相关人员进行本体的维修。
3. 自适应振动抑制功能(需在艾利特技术人员带领下执行)
如果通过以上方法未排除出抖动原因且手动手动拖动无卡顿且机器人运动轨迹抖动,可以试试通过自适应振动抑制功能使机器人减少抖动。
自适应振动抑制功能:可以在一定程度上抑制运行过程中出现的持续抖动,操作步骤如下:
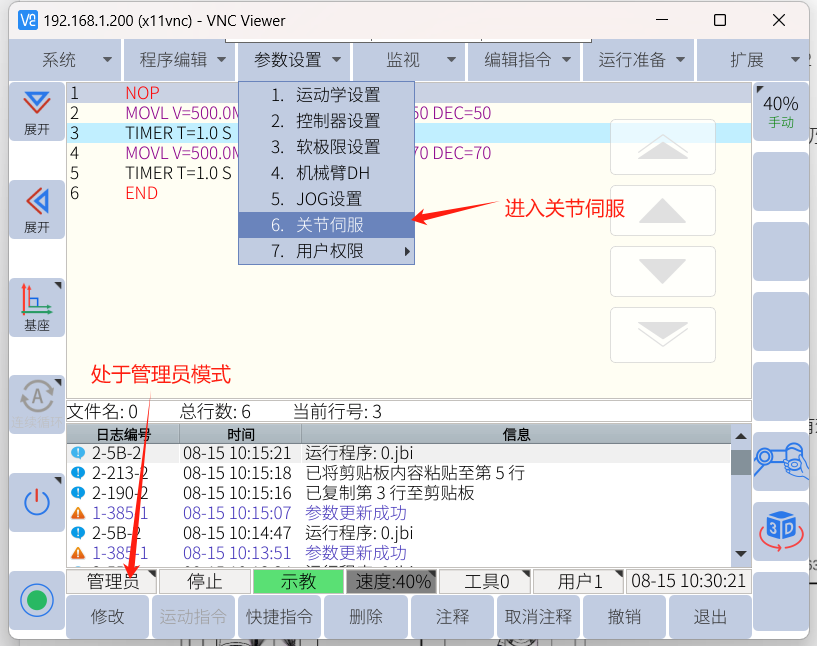
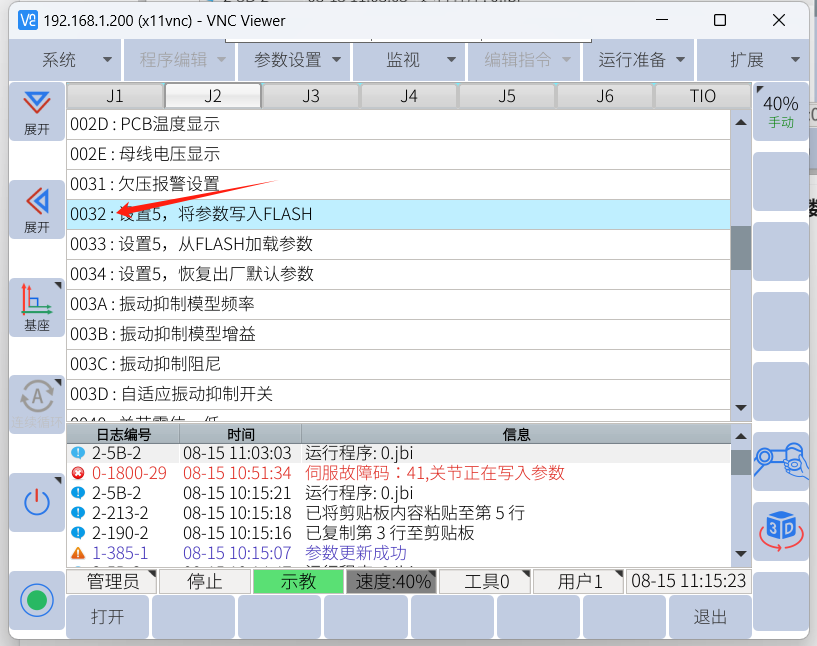
1. 进入关节伺服
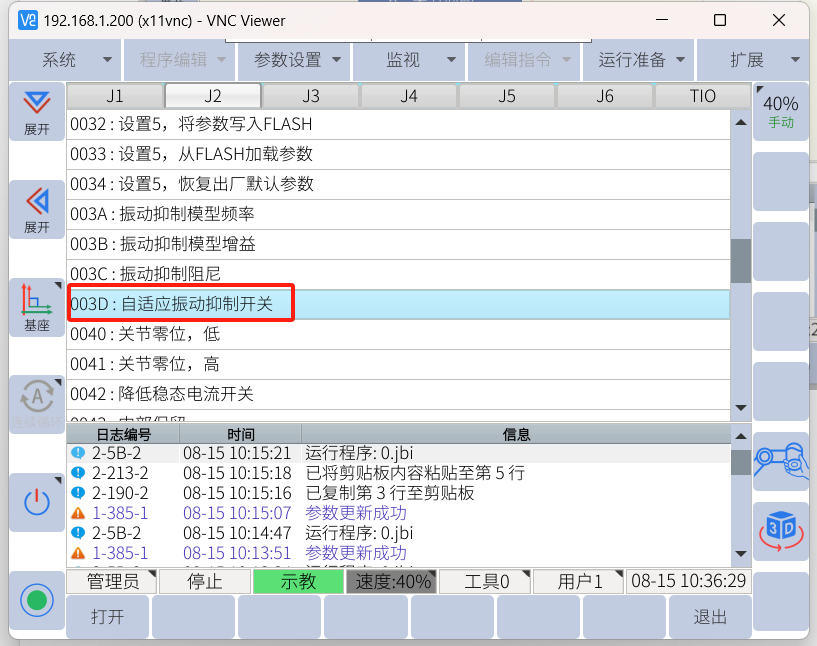
2. 找到003D,一般抖动牵连的关节是J2和J3较多,可仅打开这两个关节的震动抑制功能。
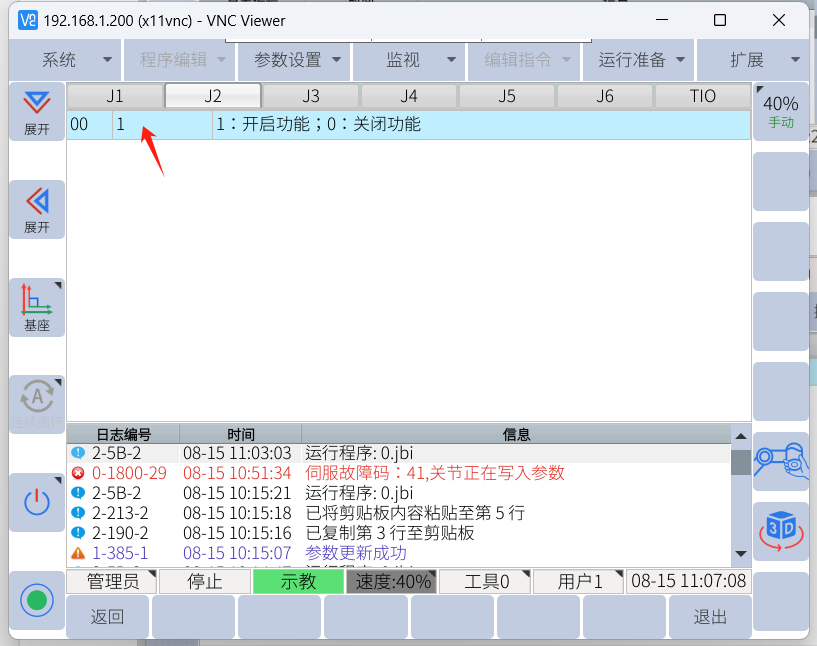
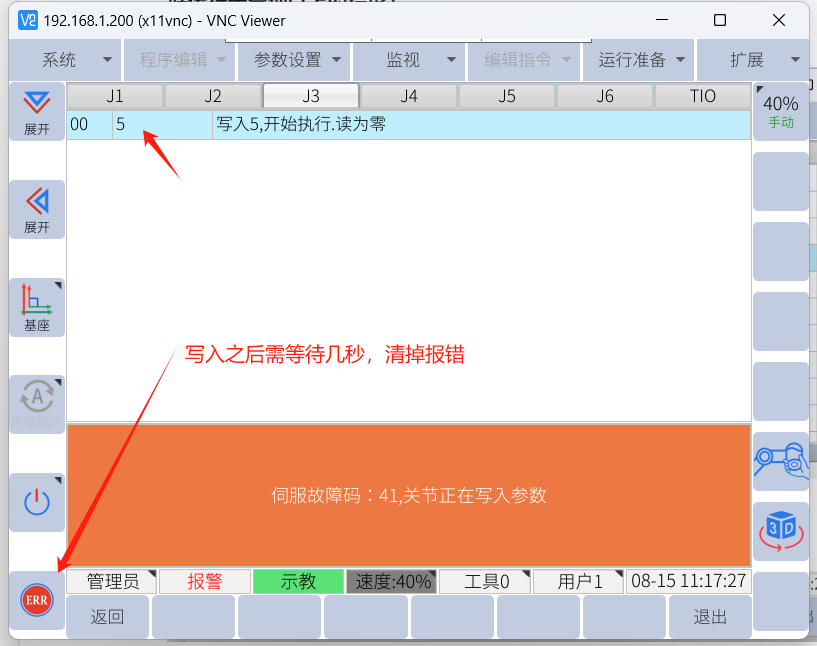
3. 写入1开启功能,然后退出即可。
4. 运行项目的程序,伺服会针对此段程序自动学习一组合适的抑制振动的参数(最好运行十分钟以上的程序)。
4. 常见问题解答
1. 根据实际工具情况,合理设置机器人负载数据。
2. 要根据实际情况合理设定速度。
3. 调试过程中速度尽量放慢,碰撞检测要打开,避免发生碰撞机器人发生抖动。
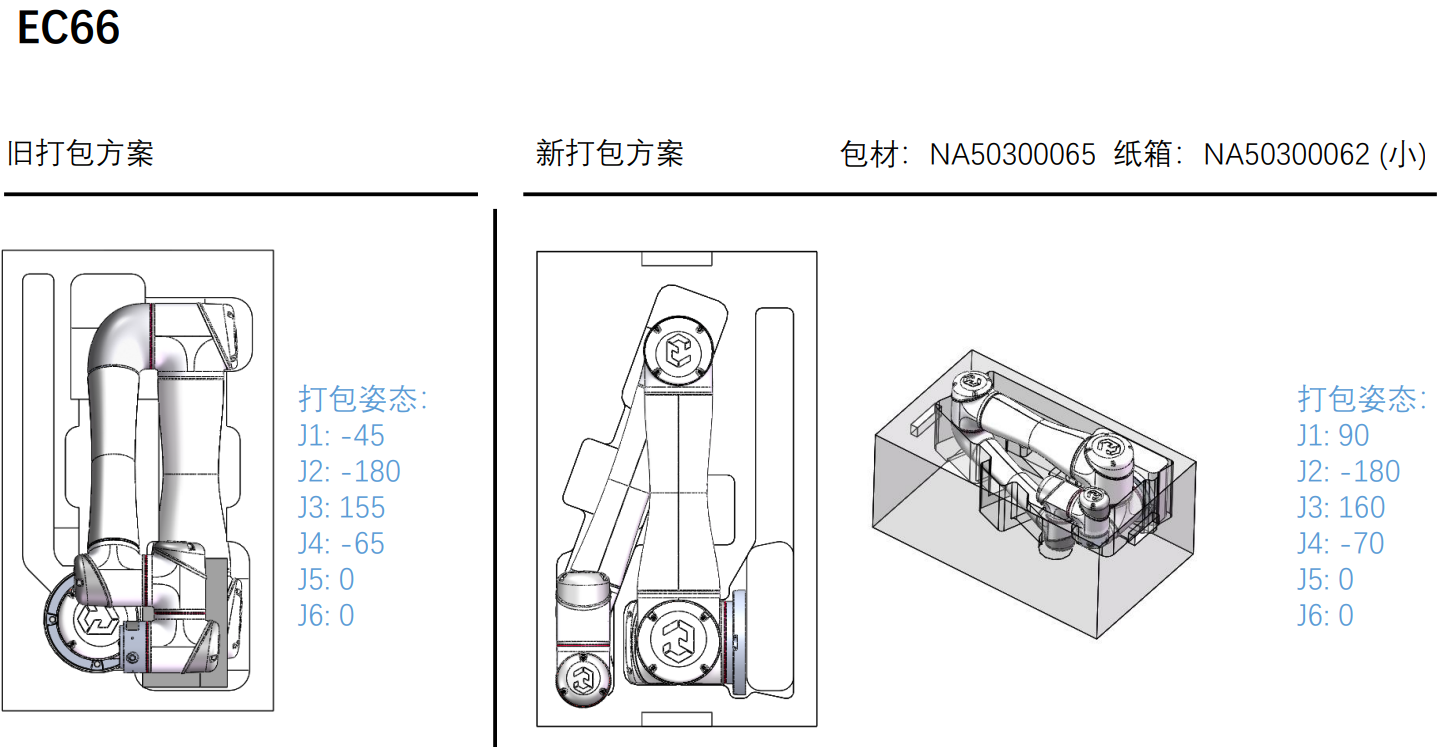
4. 运输过程中需要机器人的2、3轴不要受力,有支撑,合理的打包姿态运输能能够有效的避免机器人抖动。打包姿态如图: