
















EC二次开发启动流程
2025-07-21
1. 简介
客户应用场景中可能会要求使用 SDK 来开发,下面介绍 SDK 启动机器人方法,过程中请保持机器人为远程模式(REMOTE),与示教器操作大体一致只是以代码的形式分步执行,清除报错,上使能,同步,编码器校准等功能,至机器人处于可运行状态。
以下各指令代码可参考SDK手册
2. 操作流程
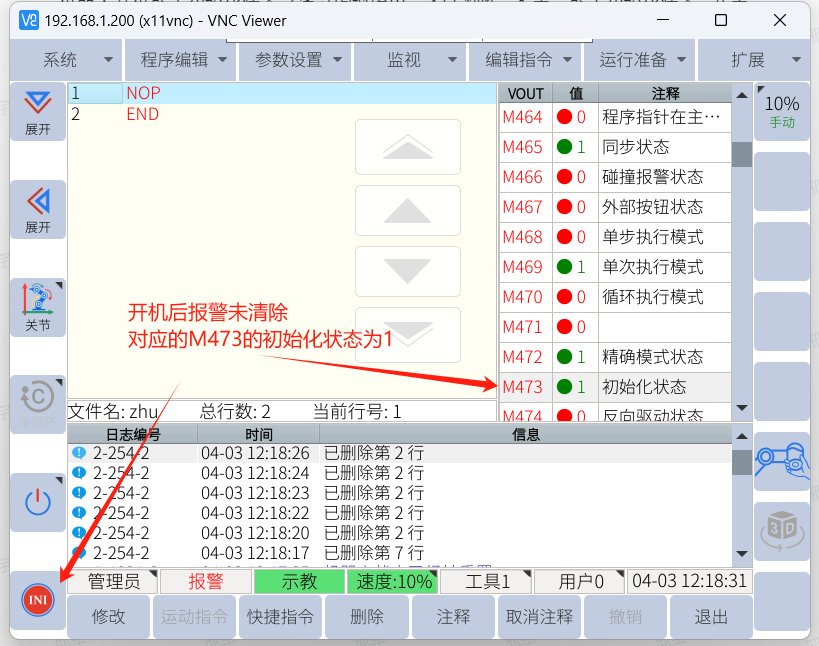
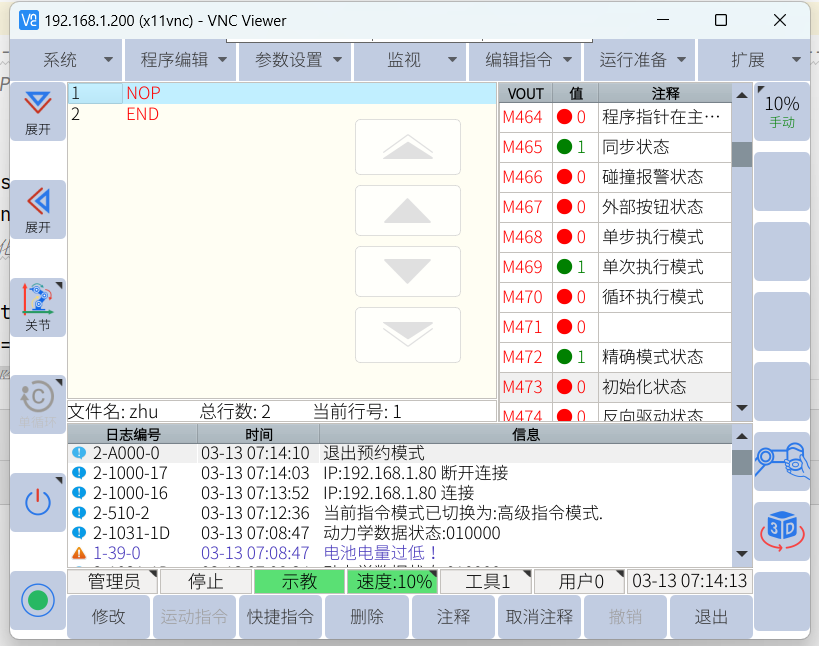
2.1 初始化状态
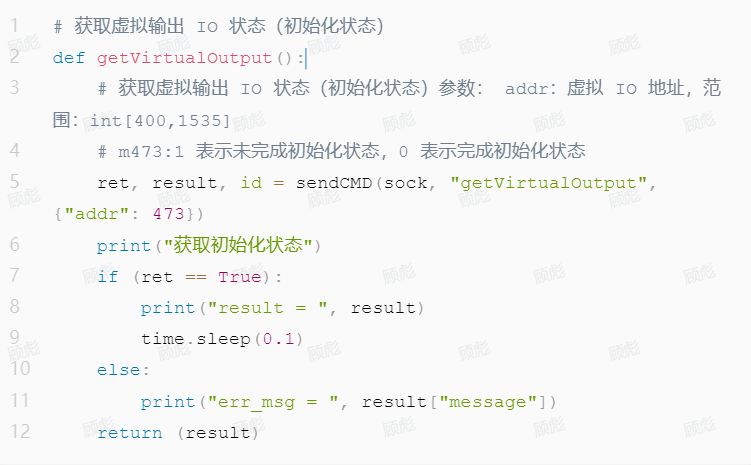
机器人开机处于初始化状态(通过虚拟输出 m473 判断,1 表示未完成初始化状态,0 表示完成初始化状态),指令函数可使用getVirtualOutput。
获取初始化状态代码示例():
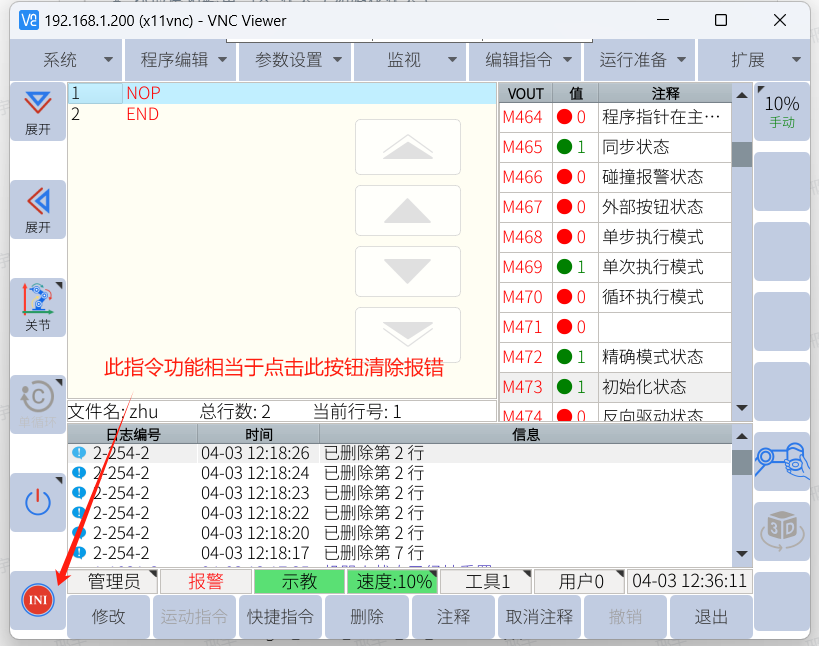
2.2 清除报错并释放抱闸
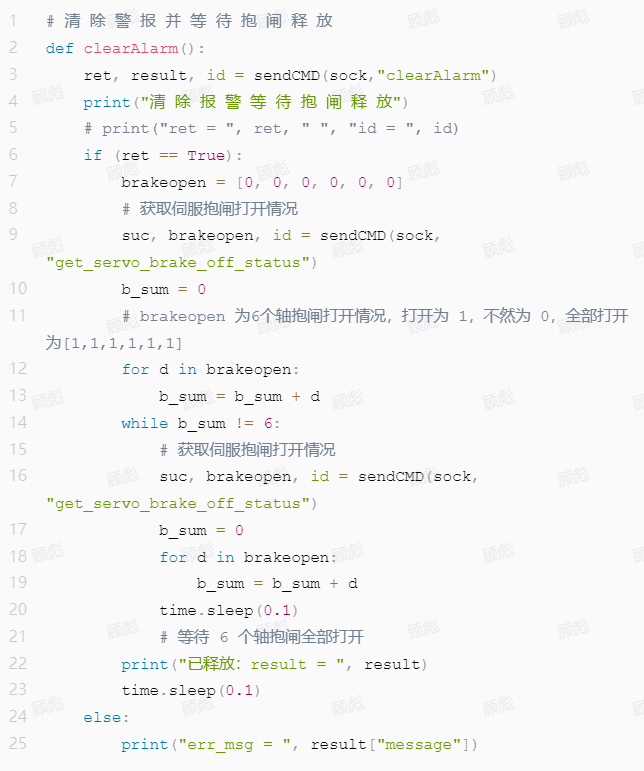
如上序初始化判断为未初始化状态则需要使用 clearAlarm 指令对机器人清错和打开抱闸。机器人抱闸打开情况可以通过 get_servo_brake_off_status 函数判断。
清除报错并等待抱闸释放代码示例():
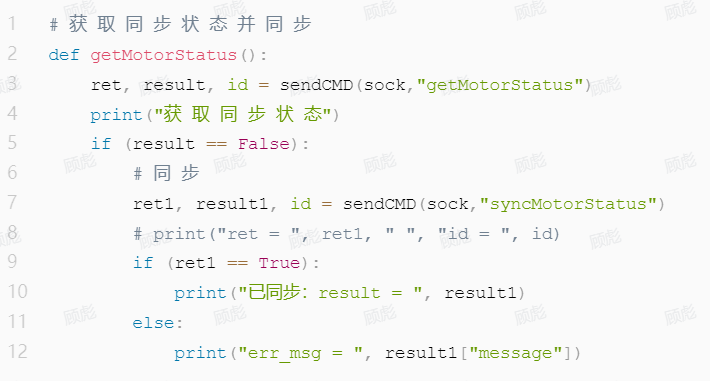
2.3 获取同步状态并同步
获取机器人同步状态 getMotorStatus,若未同步执行同步指令 syncMotorStatus。

获取同步状态代码示例():
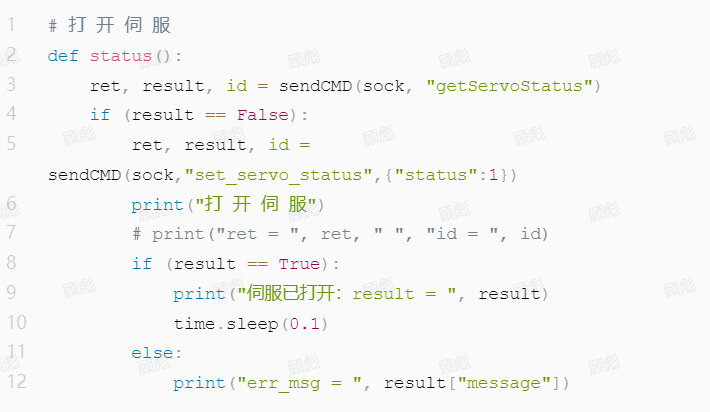
2.4 打开伺服使能
机器人使用运动功能或运动指令时需打开伺服使能,上使能后才能执行。
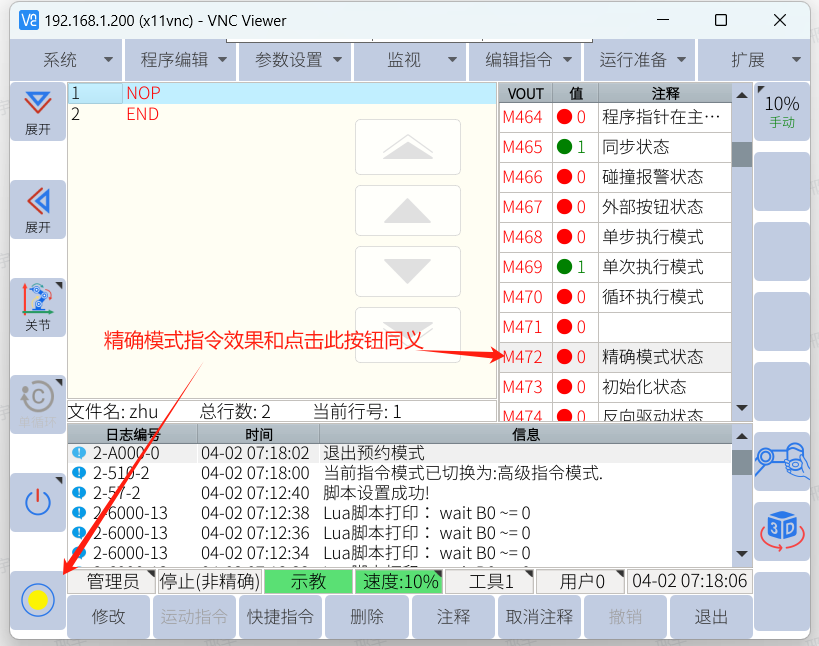
2.5 获取机器人是否处于精确模式
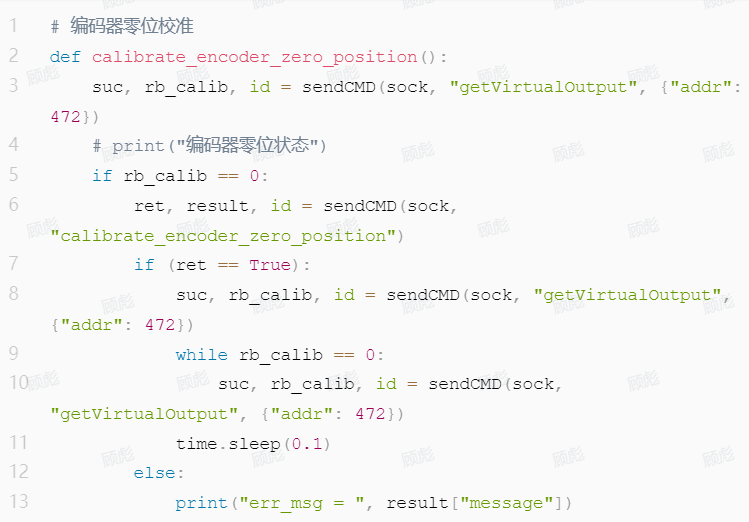
判断机器人是否处于精确模式(通过虚拟输出 m472 判断,0 表示未校准模式,1 表示精确模式),若未校准,执行校准操作 calibrate_encoder_zero_position,并等待机器人达到m472=1 的精确模式。
获取机器人是否处于精确模式并执行精确模式指令示例():
# 编码器零位校准
3. 汇总
操作流程的2.1-2.5汇总在一起就可以实现SDK一键启动至可运行状态(见下图)。


注:所有SDK指令代码运行时,需要机器人处于远程模式(REMOTE)


























