CS机器人进入恢复模式的处理方法
1. 简介
本文简单介绍CS机器人在进入恢复模式时该如何操作,有两种情况会进入到恢复模式中,一种是机器人在运行过程中速度过快关节超过了极限位置进入恢复模式,一种是在配置了安全平面时机器人末端TCP超过了安全平面
2. 操作流程
2.1在运行中关节进入恢复模式
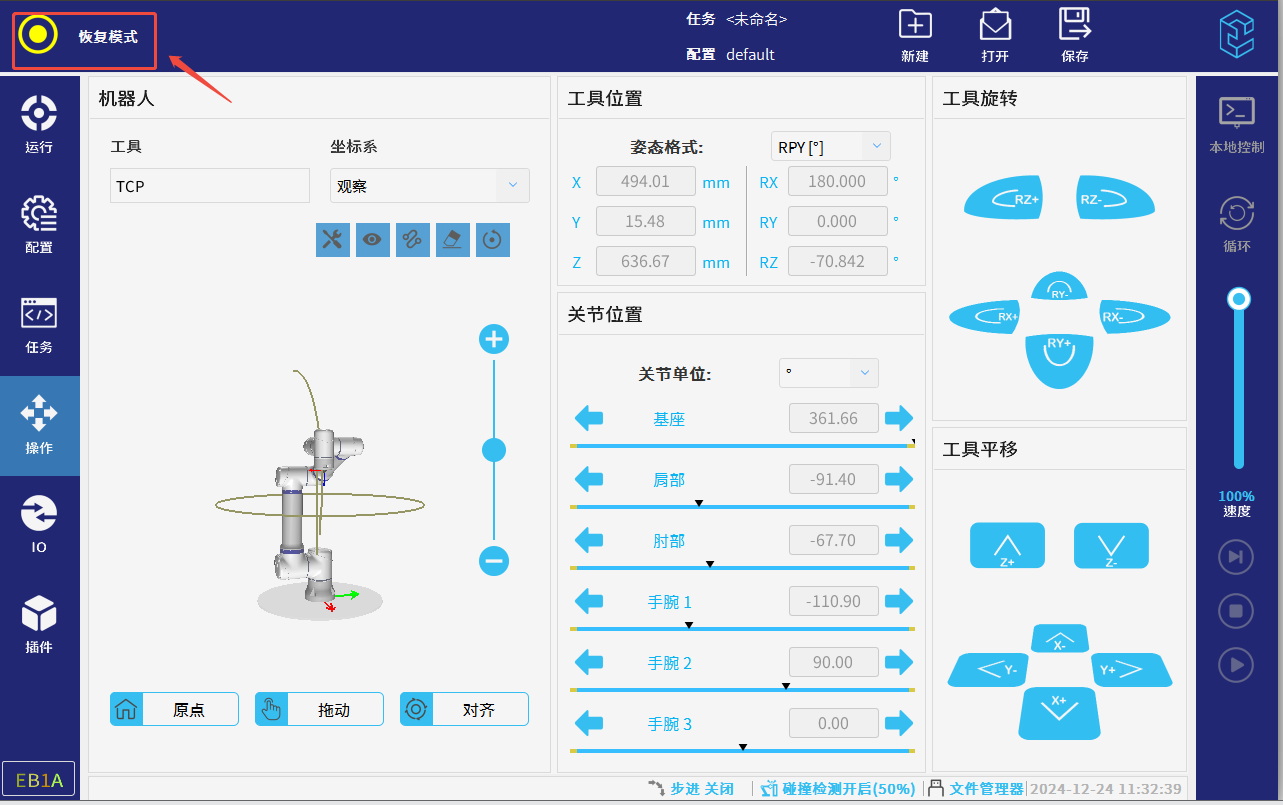
在运行中机器人速度过快超过关节极限

此时机器人就会进入恢复模式,只需要查看机器人对应的关节位置,把相应的关节移动至关节范围内即可操作方法如下

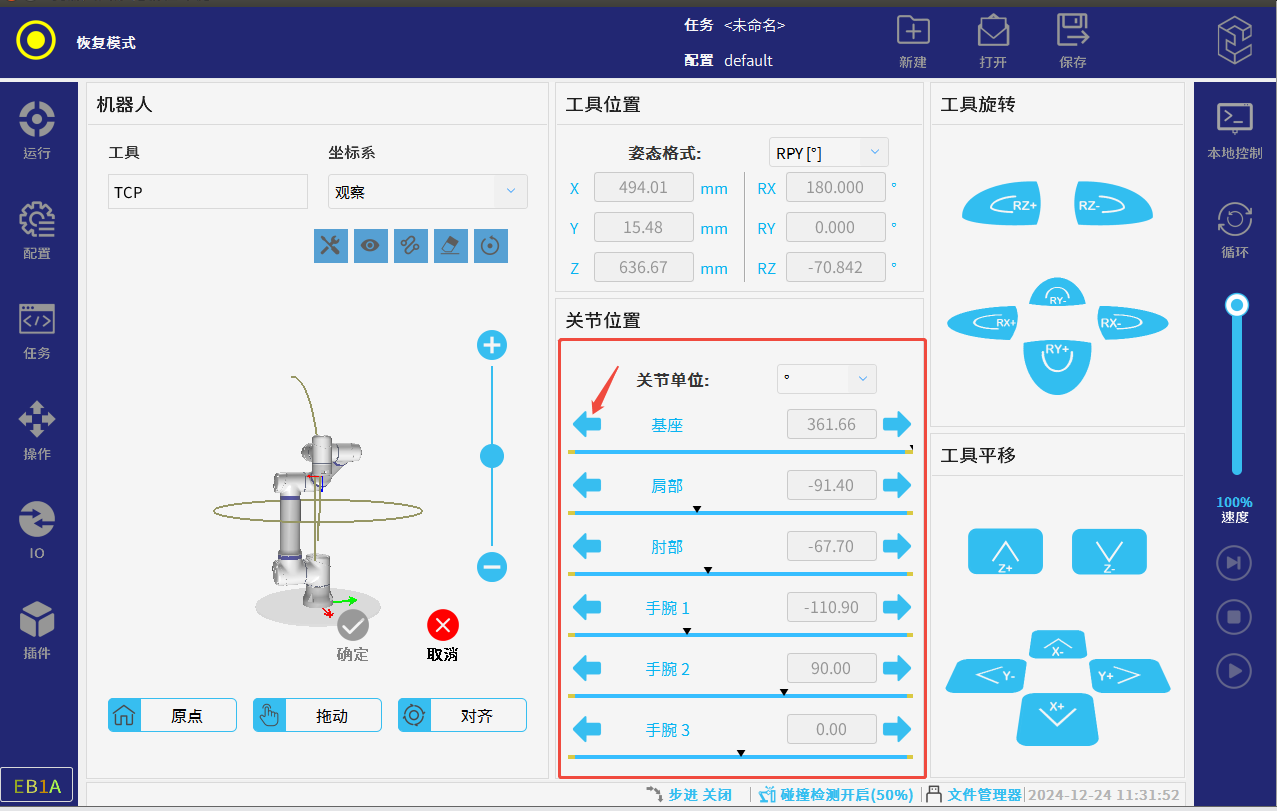

此时机器人的基座已经在关节限制内,左上角恢复正常模式,点击确定按钮即可退出恢复模式
2.2在安全平面中进入恢复模式
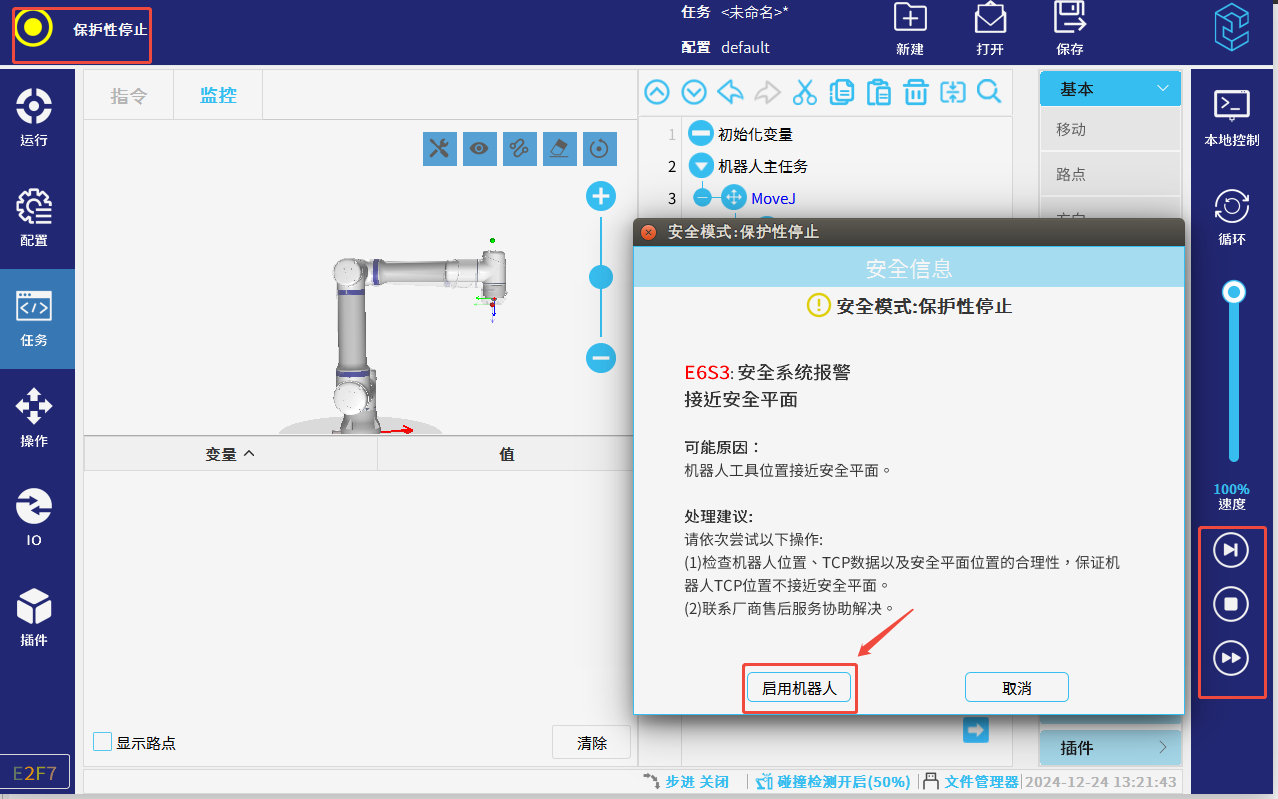
机器人末端TCP超过安全平面时会进入到恢复模式;正常情况下机器人会在接近安全平面时就会暂停运行,此时会进入保护性停止,机器人会暂停程序,此时只需点击启用机器人即可
当机器人速度过快超过安全平面时此时就会进入到恢复模式如下图

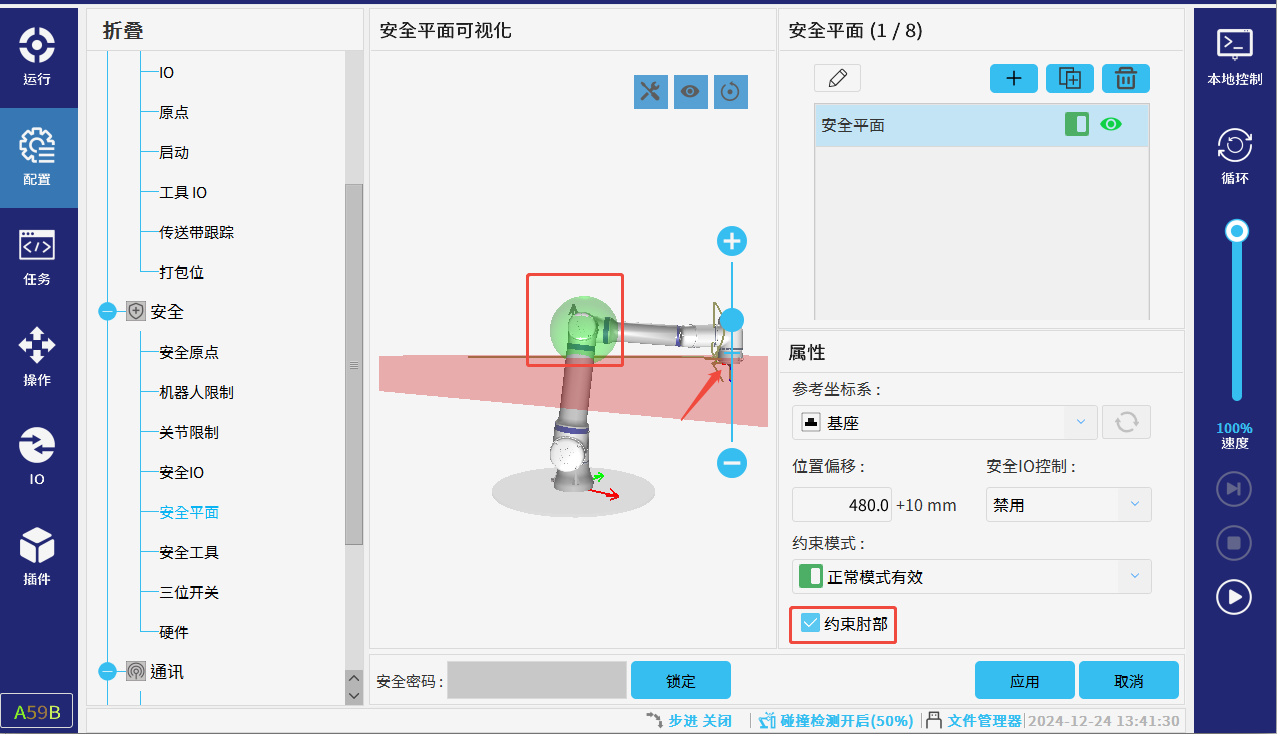
设置安全平面时可以选择勾选或者不勾选“约束肘部”(勾选了会在肘部有个球体),如果勾选了则需要把肘部连同末端TCP一同脱离安全平面,如果没有勾选则只需要把末端TCP脱离安全平面,操作方法如同2.1
版权声明:本文内容由网络用户投稿,版权归原作者所有,本站不拥有其著作权,亦不承担相应法律责任。如果您发现本站中有涉嫌抄袭或描述失实的内容,请联系我们jiasou666@gmail.com 处理,核实后本网站将在24小时内删除侵权内容。
相关文章